 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnvironment Perception Framework Fusing Multi-Object Tracking, Dynamic Occupancy Grid Maps and Digital Maps
Paper and Code
Dec 20, 2018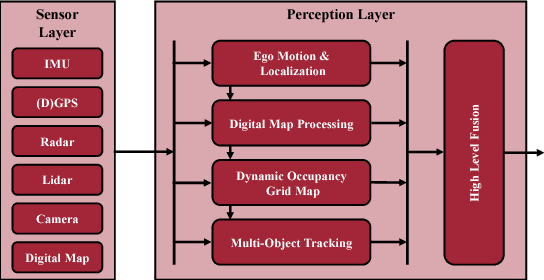
Autonomously driving vehicles require a complete and robust perception of the local environment. A main challenge is to perceive any other road users, where multi-object tracking or occupancy grid maps are commonly used. The presented approach combines both methods to compensate false positives and receive a complementary environment perception. Therefore, an environment perception framework is introduced that defines a common representation, extracts objects from a dynamic occupancy grid map and fuses them with tracks of a Labeled Multi-Bernoulli filter. Finally, a confidence value is developed, that validates object estimates using different constraints regarding physical possibilities, method specific characteristics and contextual information from a digital map. Experimental results with real world data highlight the robustness and significance of the presented fusing approach, utilizing the confidence value in rural and urban scenarios.