 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDomain Randomization for Scene-Specific Car Detection and Pose Estimation
Paper and Code
Nov 14, 2018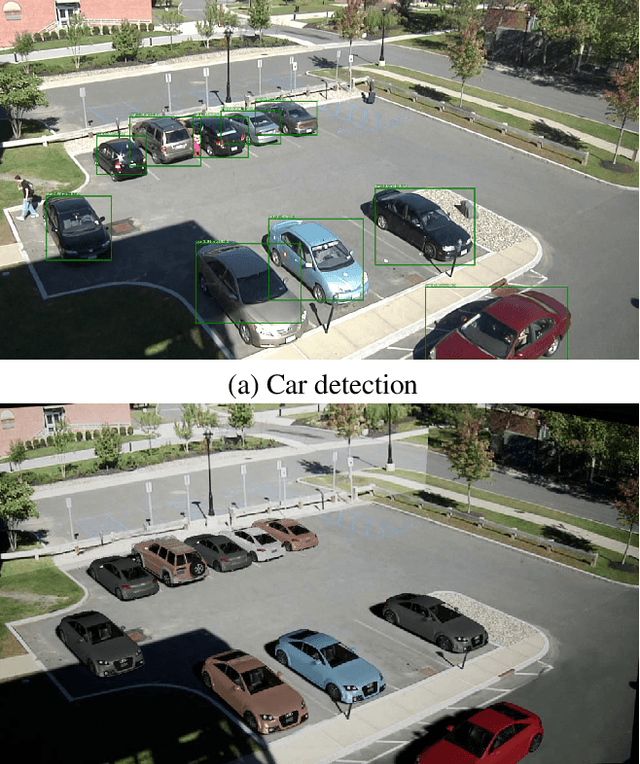
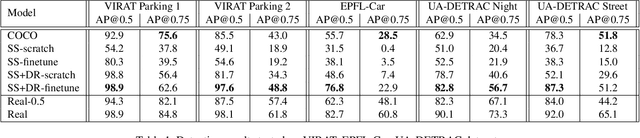
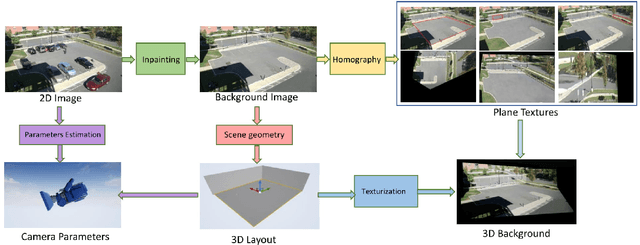
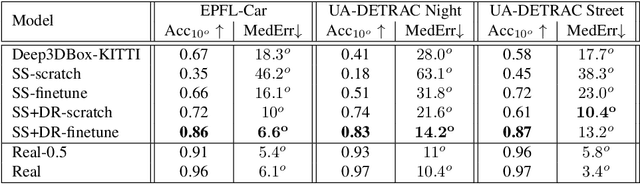
We address the issue of domain gap when making use of synthetic data to train a scene-specific object detector and pose estimator. While previous works have shown that the constraints of learning a scene-specific model can be leveraged to create geometrically and photometrically consistent synthetic data, care must be taken to design synthetic content which is as close as possible to the real-world data distribution. In this work, we propose to solve domain gap through the use of appearance randomization to generate a wide range of synthetic objects to span the space of realistic images for training. An ablation study of our results is presented to delineate the individual contribution of different components in the randomization process. We evaluate our method on VIRAT, UA-DETRAC, EPFL-Car datasets, where we demonstrate that using scene specific domain randomized synthetic data is better than fine-tuning off-the-shelf models on limited real data.