 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Factor Graph Approach to Multi-Camera Extrinsic Calibration on Legged Robots
Paper and Code
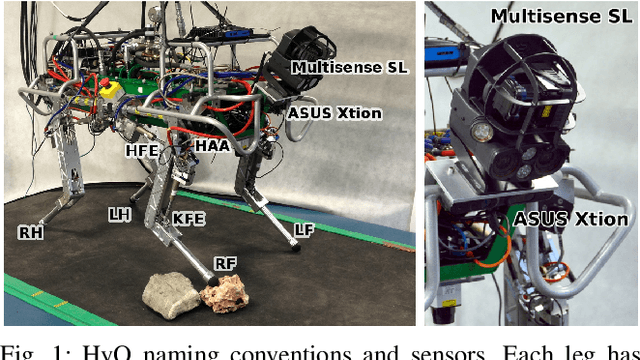
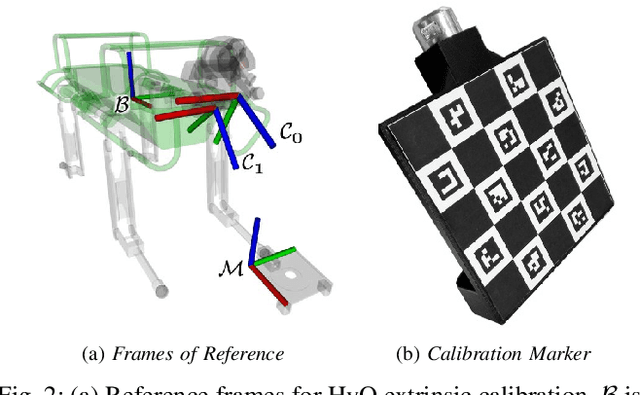
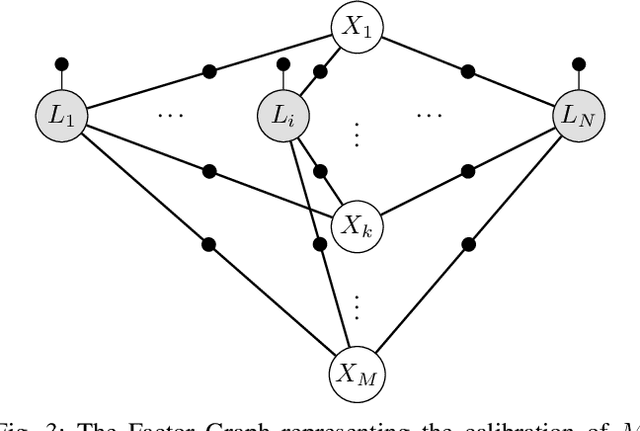
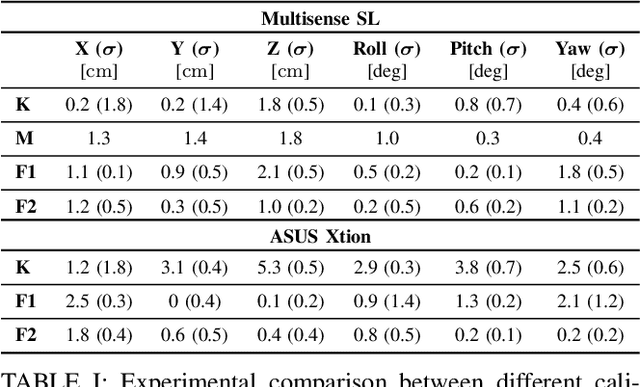
Legged robots are becoming popular not only in research, but also in industry, where they can demonstrate their superiority over wheeled machines in a variety of applications. Either when acting as mobile manipulators or just as all-terrain ground vehicles, these machines need to precisely track the desired base and end-effector trajectories, perform Simultaneous Localization and Mapping (SLAM), and move in challenging environments, all while keeping balance. A crucial aspect for these tasks is that all onboard sensors must be properly calibrated and synchronized to provide consistent signals for all the software modules they feed. In this paper, we focus on the problem of calibrating the relative pose between a set of cameras and the base link of a quadruped robot. This pose is fundamental to successfully perform sensor fusion, state estimation, mapping, and any other task requiring visual feedback. To solve this problem, we propose an approach based on factor graphs that jointly optimizes the mutual position of the cameras and the robot base using kinematics and fiducial markers. We also quantitatively compare its performance with other state-of-the-art methods on the hydraulic quadruped robot HyQ. The proposed approach is simple, modular, and independent from external devices other than the fiducial marker.