Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLimited Visibility and Uncertainty Aware Motion Planning for Automated Driving
Paper and Code
Oct 30, 2018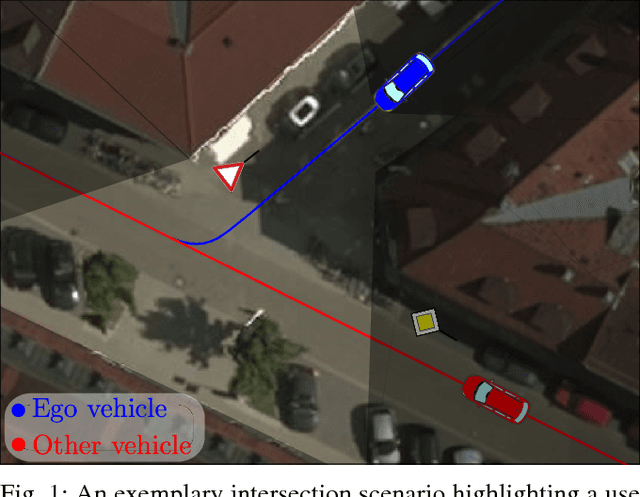
Adverse weather conditions and occlusions in urban environments result in impaired perception. The uncertainties are handled in different modules of an automated vehicle, ranging from sensor level over situation prediction until motion planning. This paper focuses on motion planning given an uncertain environment model with occlusions. We present a method to remain collision free for the worst-case evolution of the given scene. We define criteria that measure the available margins to a collision while considering visibility and interactions, and consequently integrate conditions that apply these criteria into an optimization-based motion planner. We show the generality of our method by validating it in several distinct urban scenarios.
* In Proceedings of the IEEE Intelligent Vehicles Symposium (IV),
Changshu-Suzhou China, 26-30 June 2018, pp. 1171--1178
View paper on