 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust 6D Object Pose Estimation in Cluttered Scenes using Semantic Segmentation and Pose Regression Networks
Paper and Code
Oct 08, 2018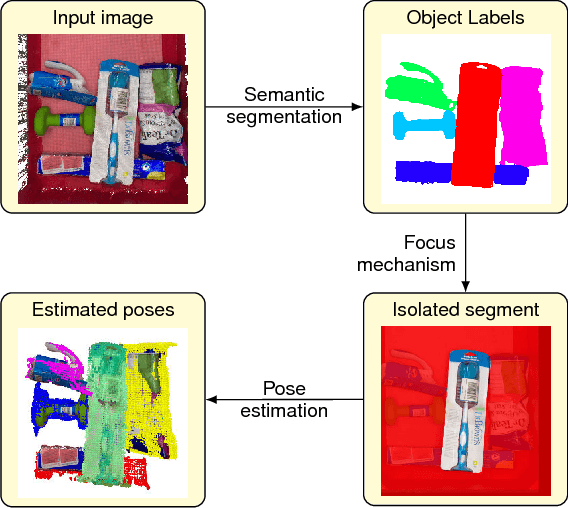
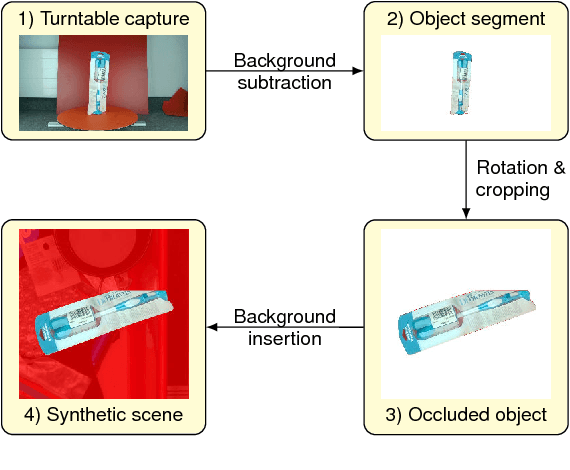
Object pose estimation is a crucial prerequisite for robots to perform autonomous manipulation in clutter. Real-world bin-picking settings such as warehouses present additional challenges, e.g., new objects are added constantly. Most of the existing object pose estimation methods assume that 3D models of the objects is available beforehand. We present a pipeline that requires minimal human intervention and circumvents the reliance on the availability of 3D models by a fast data acquisition method and a synthetic data generation procedure. This work builds on previous work on semantic segmentation of cluttered bin-picking scenes to isolate individual objects in clutter. An additional network is trained on synthetic scenes to estimate object poses from a cropped object-centered encoding extracted from the segmentation results. The proposed method is evaluated on a synthetic validation dataset and cluttered real-world scenes.