 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoment-Sum-Of-Squares Approach For Fast Risk Estimation In Uncertain Environments
Paper and Code
Oct 03, 2018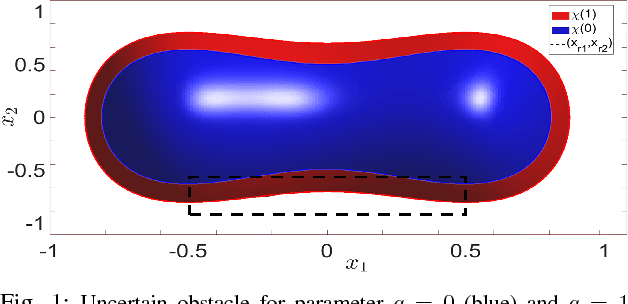
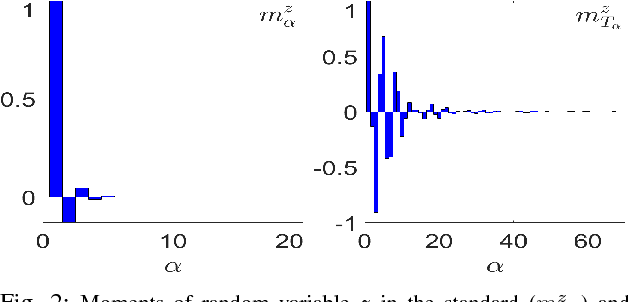
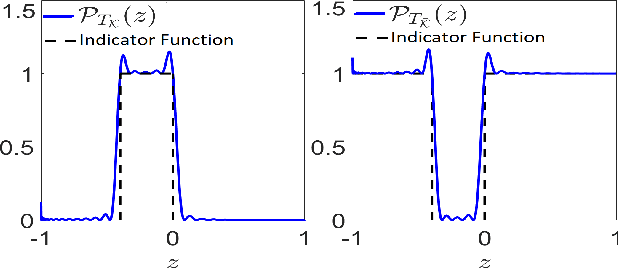
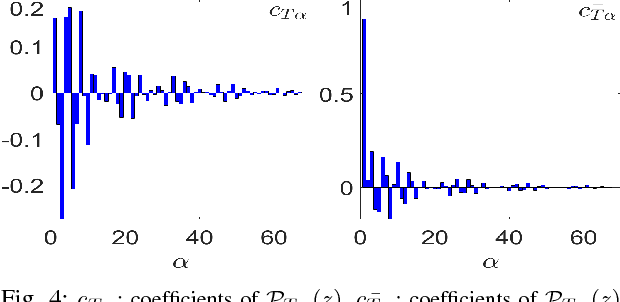
In this paper, we address the risk estimation problem where one aims at estimating the probability of violation of safety constraints for a robot in the presence of bounded uncertainties with arbitrary probability distributions. In this problem, an unsafe set is described by level sets of polynomials that is, in general, a non-convex set. Uncertainty arises due to the probabilistic parameters of the unsafe set and probabilistic states of the robot. To solve this problem, we use a moment-based representation of probability distributions. We describe upper and lower bounds of the risk in terms of a linear weighted sum of the moments. Weights are coefficients of a univariate Chebyshev polynomial obtained by solving a sum-of-squares optimization problem in the offline step. Hence, given a finite number of moments of probability distributions, risk can be estimated in real-time. We demonstrate the performance of the provided approach by solving probabilistic collision checking problems where we aim to find the probability of collision of a robot with a non-convex obstacle in the presence of probabilistic uncertainties in the location of the robot and size, location, and geometry of the obstacle.