 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear SLAM: Linearising the SLAM Problems using Submap Joining
Paper and Code
Sep 18, 2018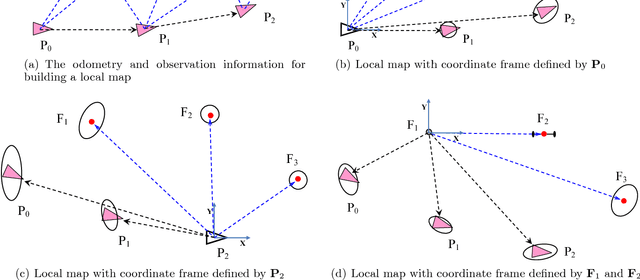
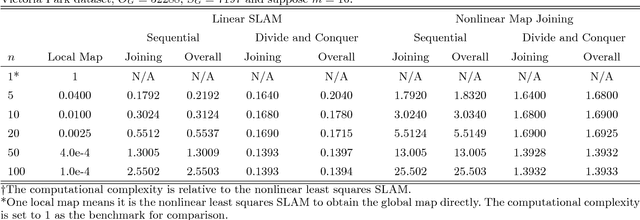
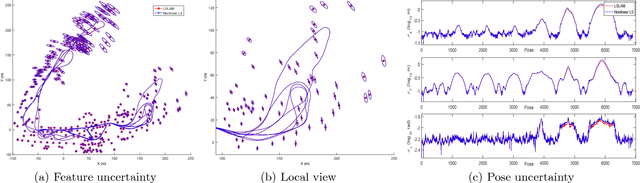
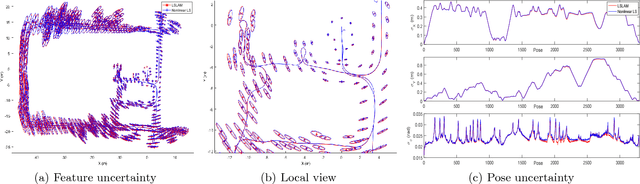
The main contribution of this paper is a new submap joining based approach for solving large-scale Simultaneous Localization and Mapping (SLAM) problems. Each local submap is independently built using the local information through solving a small-scale SLAM; the joining of submaps mainly involves solving linear least squares and performing nonlinear coordinate transformations. Through approximating the local submap information as the state estimate and its corresponding information matrix, judiciously selecting the submap coordinate frames, and approximating the joining of a large number of submaps by joining only two maps at a time, either sequentially or in a more efficient Divide and Conquer manner, the nonlinear optimization process involved in most of the existing submap joining approaches is avoided. Thus the proposed submap joining algorithm does not require initial guess or iterations since linear least squares problems have closed-form solutions. The proposed Linear SLAM technique is applicable to feature-based SLAM, pose graph SLAM and D-SLAM, in both two and three dimensions, and does not require any assumption on the character of the covariance matrices. Simulations and experiments are performed to evaluate the proposed Linear SLAM algorithm. Results using publicly available datasets in 2D and 3D show that Linear SLAM produces results that are very close to the best solutions that can be obtained using full nonlinear optimization algorithm started from an accurate initial guess. The C/C++ and MATLAB source codes of Linear SLAM are available on OpenSLAM.