 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeController Synthesis for Discrete-time Hybrid Polynomial Systems via Occupation Measures
Paper and Code
Sep 16, 2018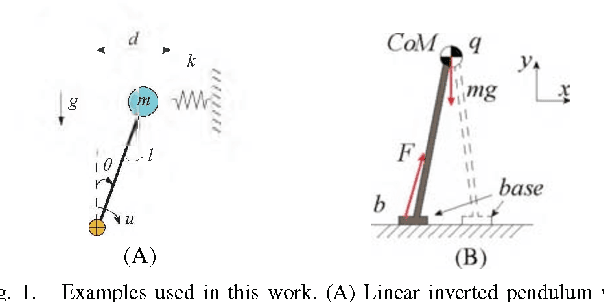

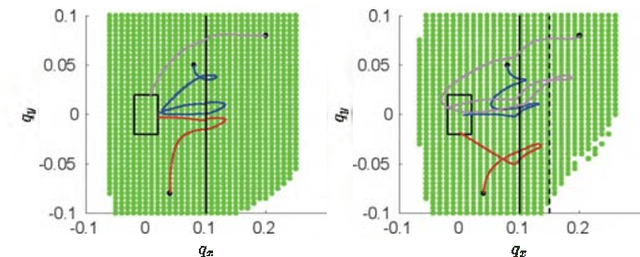
We present a novel controller synthesis approach for discrete-time hybrid polynomial systems, a class of systems that can model a wide variety of interactions between robots and their environment. The approach is rooted in recently developed techniques that use occupation measures to formulate the controller synthesis problem as an infinite-dimensional linear program. The relaxation of the linear program as a finite-dimensional semidefinite program can be solved to generate a control law. The approach has several advantages including that the formulation is convex, that the formulation and the extracted controllers are simple, and that the computational complexity is polynomial in the state and control input dimensions. We illustrate our approach on some robotics examples.