 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhere Should We Place LiDARs on the Autonomous Vehicle? - An Optimal Design Approach
Paper and Code
Apr 07, 2019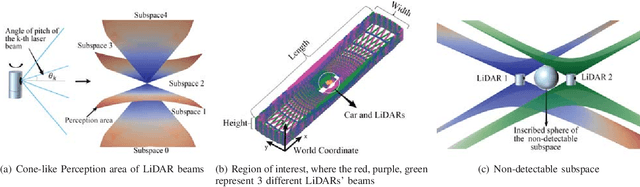
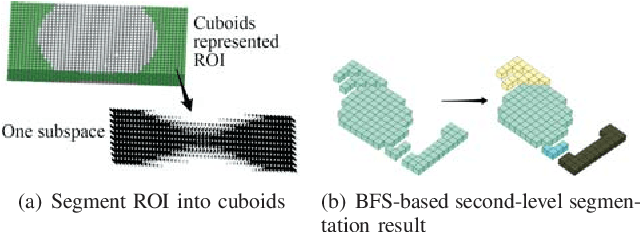
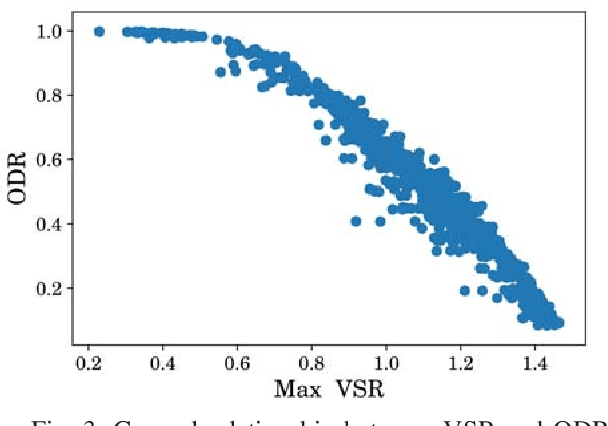
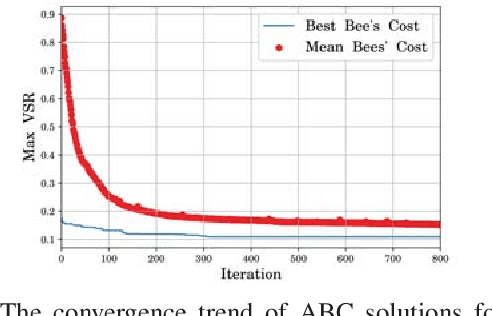
Autonomous vehicle manufacturers recognize that LiDAR provides accurate 3D views and precise distance measures under highly uncertain driving conditions. Its practical implementation, however, remains costly. This paper investigates the optimal LiDAR configuration problem to achieve utility maximization. We use the perception area and non-detectable subspace to construct the design procedure as solving a min-max optimization problem and propose a bio-inspired measure -- volume to surface area ratio (VSR) -- as an easy-to-evaluate cost function representing the notion of the size of the non-detectable subspaces of a given configuration. We then adopt a cuboid-based approach to show that the proposed VSR-based measure is a well-suited proxy for object detection rate. It is found that the Artificial Bee Colony evolutionary algorithm yields a tractable cost function computation. Our experiments highlight the effectiveness of our proposed VSR measure in terms of cost-effectiveness configuration as well as providing insightful analyses that can improve the design of AV systems.