 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCost Functions for Robot Motion Style
Paper and Code
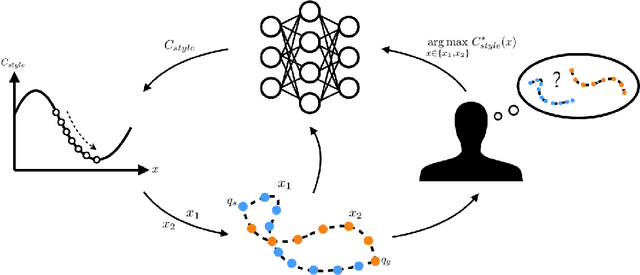
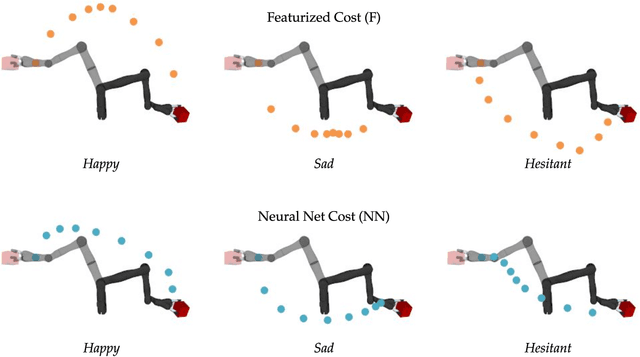
We focus on autonomously generating robot motion for day to day physical tasks that is expressive of a certain style or emotion. Because we seek generalization across task instances and task types, we propose to capture style via cost functions that the robot can use to augment its nominal task cost and task constraints in a trajectory optimization process. We compare two approaches to representing such cost functions: a weighted linear combination of hand-designed features, and a neural network parameterization operating on raw trajectory input. For each cost type, we learn weights for each style from user feedback. We contrast these approaches to a nominal motion across different tasks and for different styles in a user study, and find that they both perform on par with each other, and significantly outperform the baseline. Each approach has its advantages: featurized costs require learning fewer parameters and can perform better on some styles, but neural network representations do not require expert knowledge to design features and could even learn more complex, nuanced costs than an expert can easily design.