 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Nonlinear Normal Modes for Execution of Efficient Cyclic Motions in Soft Robots
Paper and Code
Jun 21, 2018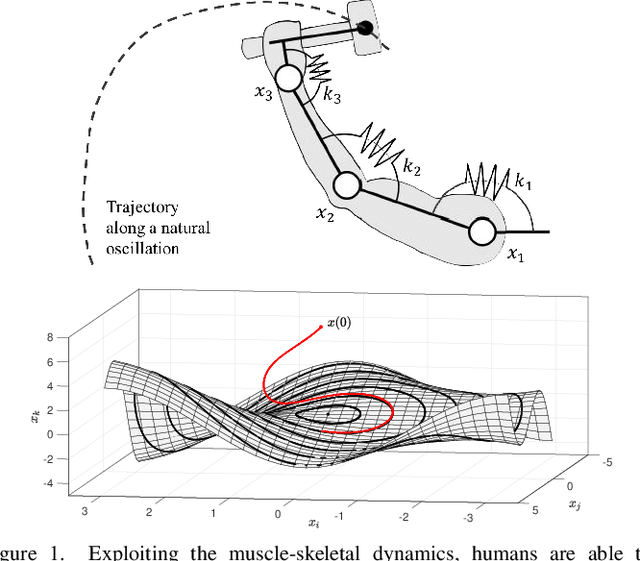
With the aim of getting closer to the performance of the animal muscleskeletal system, elastic elements are purposefully introduced in the mechanical structure of soft robots. Indeed, previous works have extensively shown that elasticity can endow robots with the ability of performing tasks with increased efficiency, peak performances, and mechanical robustness. However, despite the many achievements, a general theory of efficient motions in soft robots is still lacking. Most of the literature focuses on specific examples, or imposes a prescribed behavior through dynamic cancellations, thus defeating the purpose of introducing elasticity in the first place. This paper aims at making a step towards establishing such a general framework. To this end, we leverage on the theory of oscillations in nonlinear dynamical systems, and we take inspiration from state of the art theories about how the human central nervous system manages the muscleskeletal system. We propose to generate regular and efficient motions in soft robots by stabilizing sub-manifolds of the state space on which the system would naturally evolve. We select these sub-manifolds as the nonlinear continuation of linear eigenspaces, called nonlinear normal modes. In such a way, efficient oscillatory behaviors can be excited. We show the effectiveness of the methods in simulations on an elastic inverted pendulum, and experimentally on a segmented elastic leg.