 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Transferable UAV for Forest Visual Perception
Paper and Code
Jun 10, 2018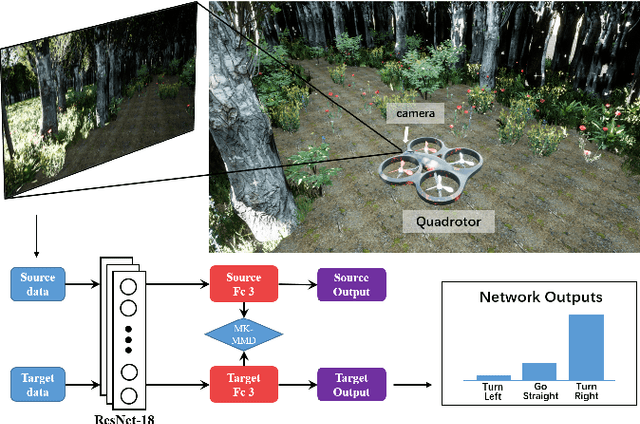

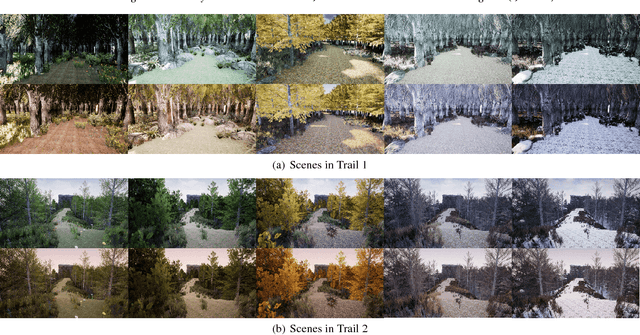
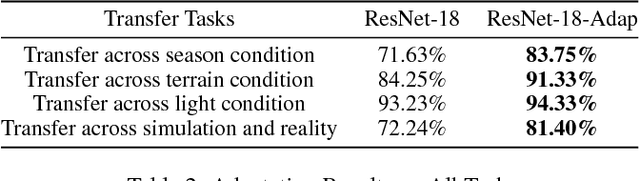
In this paper, we propose a new pipeline of training a monocular UAV to fly a collision-free trajectory along the dense forest trail. As gathering high-precision images in the real world is expensive and the off-the-shelf dataset has some deficiencies, we collect a new dense forest trail dataset in a variety of simulated environment in Unreal Engine. Then we formulate visual perception of forests as a classification problem. A ResNet-18 model is trained to decide the moving direction frame by frame. To transfer the learned strategy to the real world, we construct a ResNet-18 adaptation model via multi-kernel maximum mean discrepancies to leverage the relevant labelled data and alleviate the discrepancy between simulated and real environment. Simulation and real-world flight with a variety of appearance and environment changes are both tested. The ResNet-18 adaptation and its variant model achieve the best result of 84.08% accuracy in reality.