 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Local Information Criterion for Dynamical Systems
Paper and Code
May 27, 2018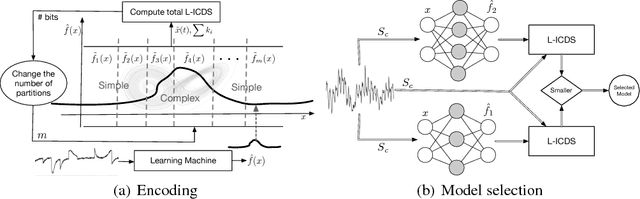

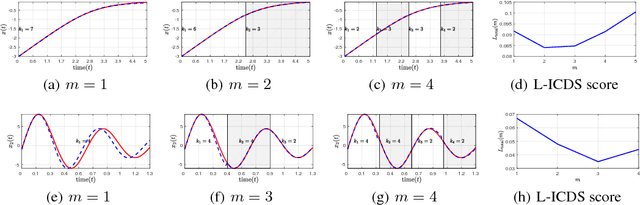
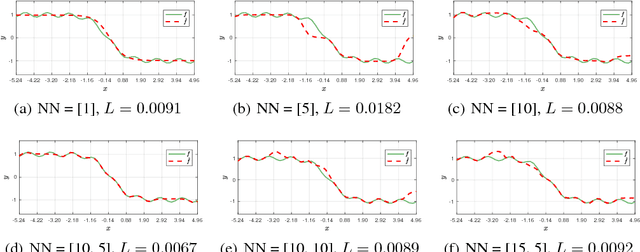
Encoding a sequence of observations is an essential task with many applications. The encoding can become highly efficient when the observations are generated by a dynamical system. A dynamical system imposes regularities on the observations that can be leveraged to achieve a more efficient code. We propose a method to encode a given or learned dynamical system. Apart from its application for encoding a sequence of observations, we propose to use the compression achieved by this encoding as a criterion for model selection. Given a dataset, different learning algorithms result in different models. But not all learned models are equally good. We show that the proposed encoding approach can be used to choose the learned model which is closer to the true underlying dynamics. We provide experiments for both encoding and model selection, and theoretical results that shed light on why the approach works.