 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Trajectory Prediction of Surrounding Vehicles with Maneuver based LSTMs
Paper and Code
May 15, 2018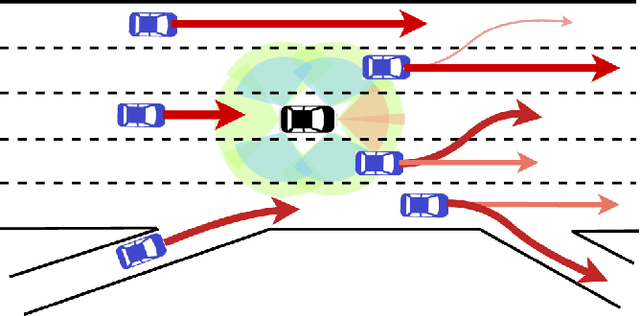
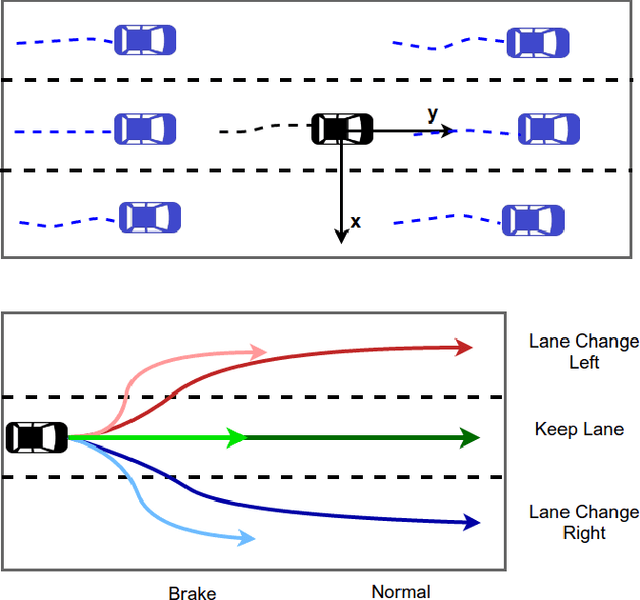
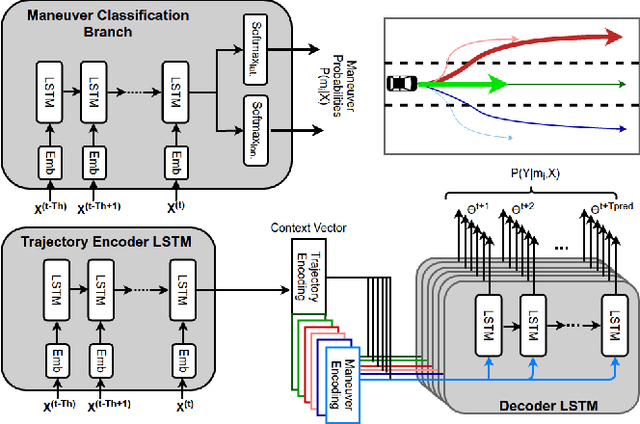
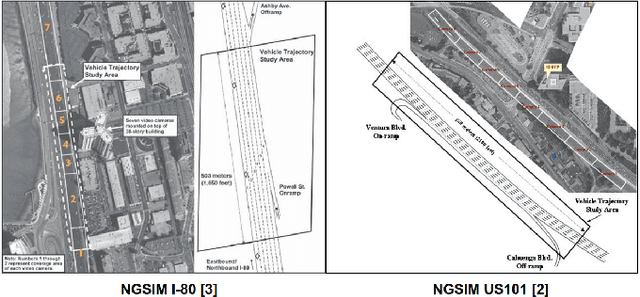
To safely and efficiently navigate through complex traffic scenarios, autonomous vehicles need to have the ability to predict the future motion of surrounding vehicles. Multiple interacting agents, the multi-modal nature of driver behavior, and the inherent uncertainty involved in the task make motion prediction of surrounding vehicles a challenging problem. In this paper, we present an LSTM model for interaction aware motion prediction of surrounding vehicles on freeways. Our model assigns confidence values to maneuvers being performed by vehicles and outputs a multi-modal distribution over future motion based on them. We compare our approach with the prior art for vehicle motion prediction on the publicly available NGSIM US-101 and I-80 datasets. Our results show an improvement in terms of RMS values of prediction error. We also present an ablative analysis of the components of our proposed model and analyze the predictions made by the model in complex traffic scenarios.