 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn algorithm for real-time restructuring of a ranging-based localization network
Paper and Code
Apr 25, 2018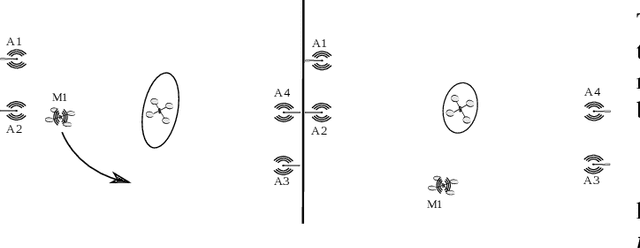
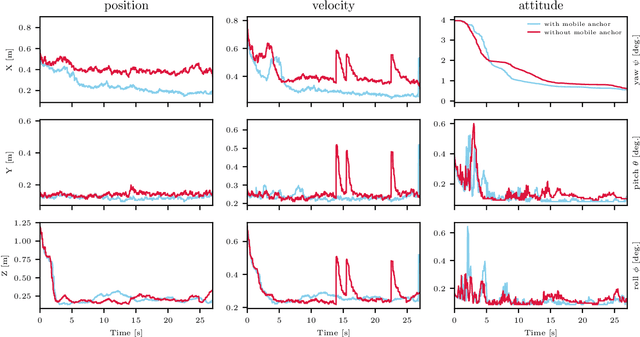
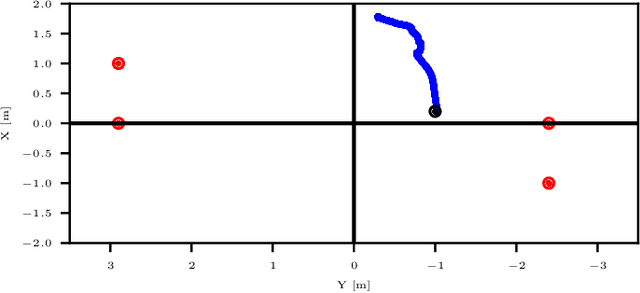
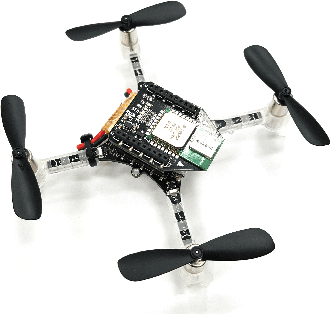
This paper presents a method to improve the localization accuracy of robots operating in a range-based localization network. The method is favorable especially when the robots operate in harsh environments where the access to a robust and reliable localization system is limited. A state estimator is used for a six degree of freedom object using inertial sensors as well as an Ultra-wideband (UWB) range measurement sensor. The estimator is incorporated into an adaptive algorithm, improving the localization quality of an agent by using a mobile UWB ranging sensor, where the mobile anchor moves to improve localization quality. The algorithm reconstructs localization network in real-time to minimize the determinant of the covariance matrix in the sense of least square error. Finally, the proposed algorithm is experimentally validated in a network consisting of one mobile and four fixed anchors.