 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Prediction of Vehicle Semantic Intention and Motion
Paper and Code
Apr 10, 2018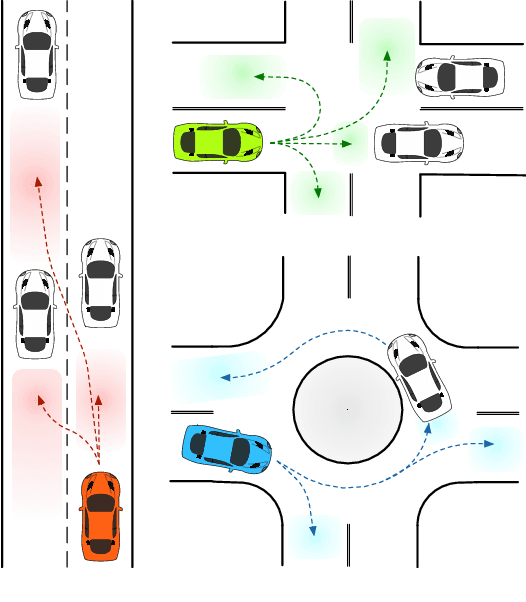
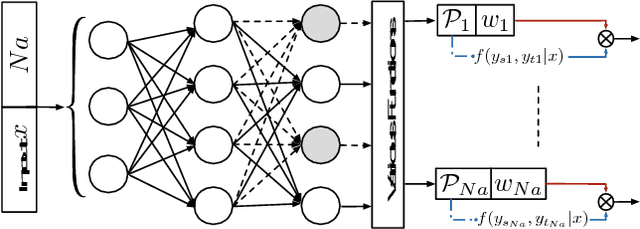
Accurately predicting the possible behaviors of traffic participants is an essential capability for future autonomous vehicles. The majority of current researches fix the number of driving intentions by considering only a specific scenario. However, distinct driving environments usually contain various possible driving maneuvers. Therefore, a intention prediction method that can adapt to different traffic scenarios is needed. To further improve the overall vehicle prediction performance, motion information is usually incorporated with classified intentions. As suggested in some literature, the methods that directly predict possible goal locations can achieve better performance for long-term motion prediction than other approaches due to their automatic incorporation of environment constraints. Moreover, by obtaining the temporal information of the predicted destinations, the optimal trajectories for predicted vehicles as well as the desirable path for ego autonomous vehicle could be easily generated. In this paper, we propose a Semantic-based Intention and Motion Prediction (SIMP) method, which can be adapted to any driving scenarios by using semantic-defined vehicle behaviors. It utilizes a probabilistic framework based on deep neural network to estimate the intentions, final locations, and the corresponding time information for surrounding vehicles. An exemplar real-world scenario was used to implement and examine the proposed method.