 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Depth Completion of a Single RGB-D Image
Paper and Code
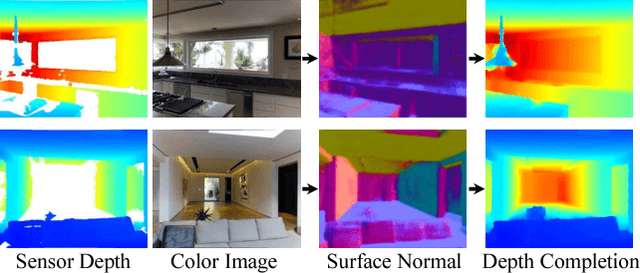

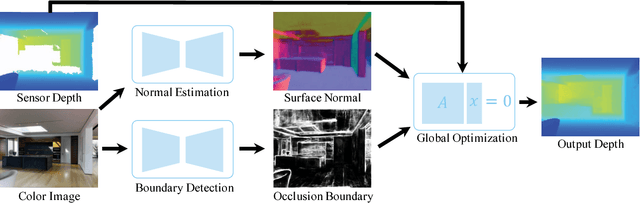
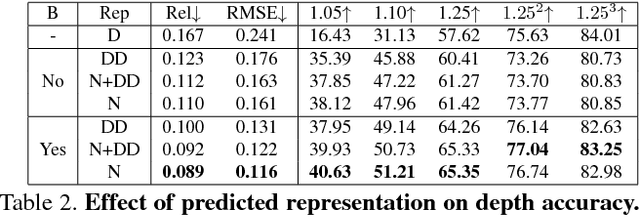
The goal of our work is to complete the depth channel of an RGB-D image. Commodity-grade depth cameras often fail to sense depth for shiny, bright, transparent, and distant surfaces. To address this problem, we train a deep network that takes an RGB image as input and predicts dense surface normals and occlusion boundaries. Those predictions are then combined with raw depth observations provided by the RGB-D camera to solve for depths for all pixels, including those missing in the original observation. This method was chosen over others (e.g., inpainting depths directly) as the result of extensive experiments with a new depth completion benchmark dataset, where holes are filled in training data through the rendering of surface reconstructions created from multiview RGB-D scans. Experiments with different network inputs, depth representations, loss functions, optimization methods, inpainting methods, and deep depth estimation networks show that our proposed approach provides better depth completions than these alternatives.