 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeController Synthesis for Discrete-Time Polynomial Systems via Occupation Measures
Paper and Code
Jul 26, 2018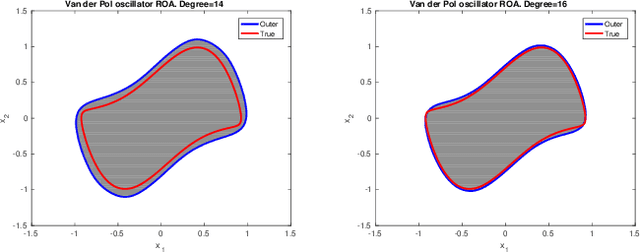
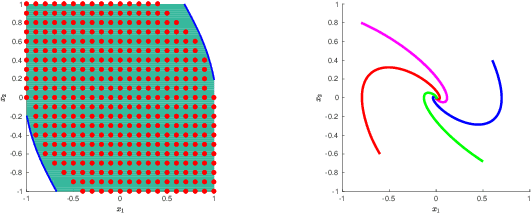
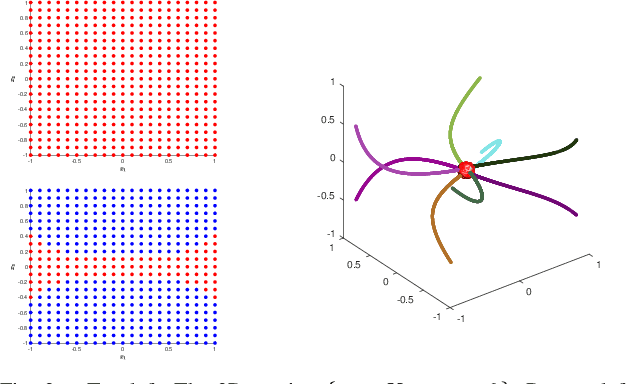
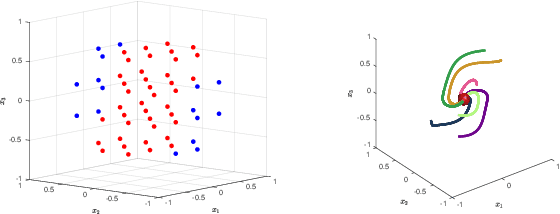
In this paper, we design nonlinear state feedback controllers for discrete-time polynomial dynamical systems via the occupation measure approach. We propose the discrete-time controlled Liouville equation, and use it to formulate the controller synthesis problem as an infinite-dimensional linear programming problem on measures, which is then relaxed as finite-dimensional semidefinite programming problems on moments of measures and their duals on sums-of-squares polynomials. Nonlinear controllers can be extracted from the solutions to the relaxed problems. The advantage of the occupation measure approach is that we solve convex problems instead of generally non-convex problems, and the computational complexity is polynomial in the state and input dimensions, and hence the approach is more scalable. In addition, we show that the approach can be applied to over-approximating the backward reachable set of discrete-time autonomous polynomial systems and the controllable set of discrete-time polynomial systems under known state feedback control laws. We illustrate our approach on several dynamical systems.