 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Learning of Depth and Ego-Motion from Monocular Video Using 3D Geometric Constraints
Paper and Code
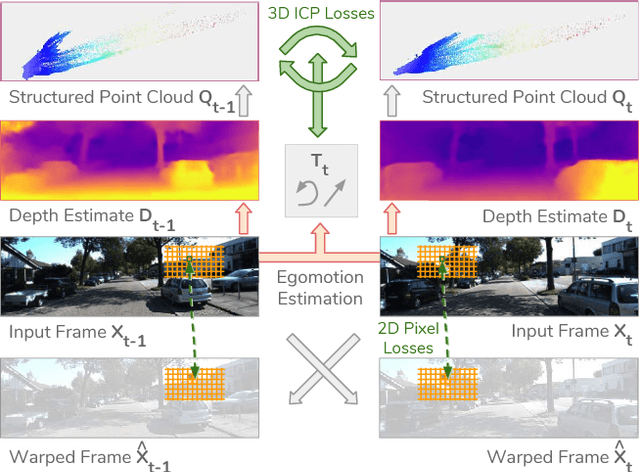
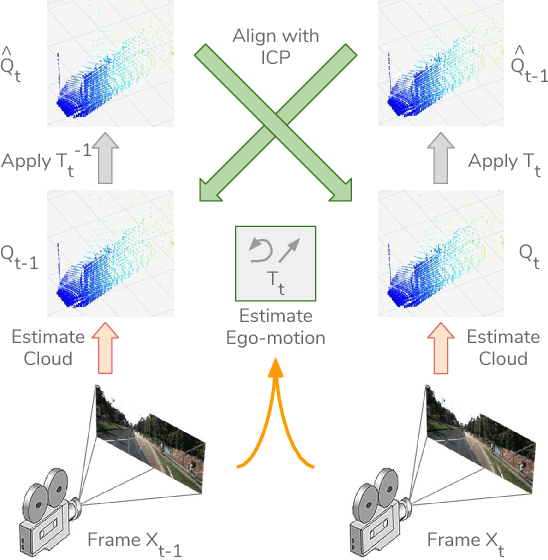
We present a novel approach for unsupervised learning of depth and ego-motion from monocular video. Unsupervised learning removes the need for separate supervisory signals (depth or ego-motion ground truth, or multi-view video). Prior work in unsupervised depth learning uses pixel-wise or gradient-based losses, which only consider pixels in small local neighborhoods. Our main contribution is to explicitly consider the inferred 3D geometry of the scene, enforcing consistency of the estimated 3D point clouds and ego-motion across consecutive frames. This is a challenging task and is solved by a novel (approximate) backpropagation algorithm for aligning 3D structures. We combine this novel 3D-based loss with 2D losses based on photometric quality of frame reconstructions using estimated depth and ego-motion from adjacent frames. We also incorporate validity masks to avoid penalizing areas in which no useful information exists. We test our algorithm on the KITTI dataset and on a video dataset captured on an uncalibrated mobile phone camera. Our proposed approach consistently improves depth estimates on both datasets, and outperforms the state-of-the-art for both depth and ego-motion. Because we only require a simple video, learning depth and ego-motion on large and varied datasets becomes possible. We demonstrate this by training on the low quality uncalibrated video dataset and evaluating on KITTI, ranking among top performing prior methods which are trained on KITTI itself.