Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal Time Collision Detection and Identification for Robotic Manipulators
Paper and Code
Feb 02, 2018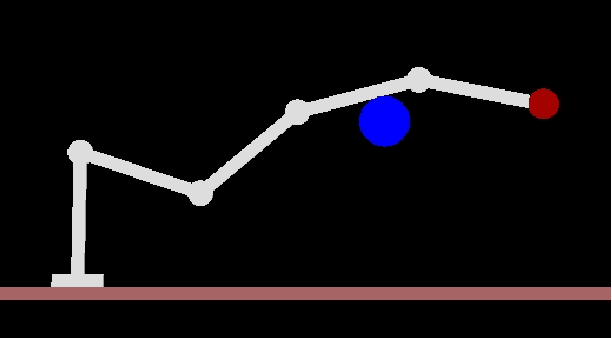
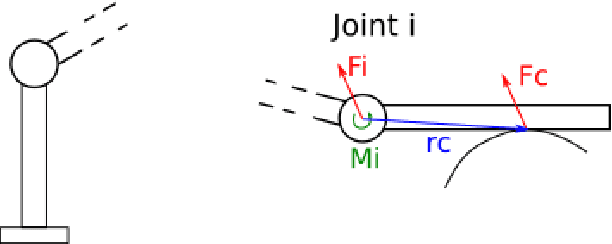
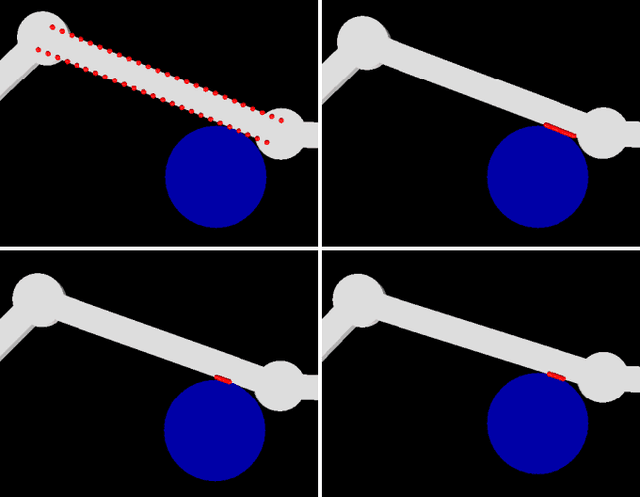
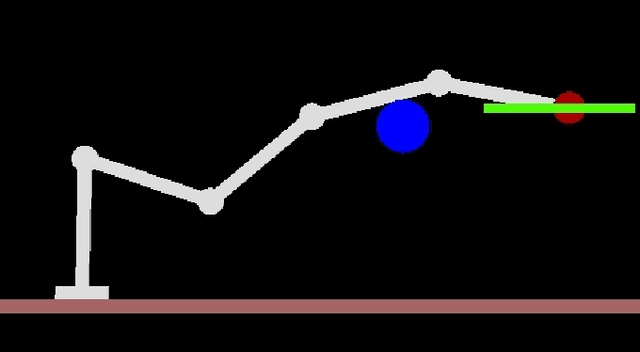
The majority of everyday tasks involve interacting with unstructured environments. This implies that, in order for robots to be truly useful they must be able to handle contacts. This paper explores how a particle filter can be used to localize a contact point and estimate the external force. We demonstrate the capability of the particle filter on a simulated 4DoF planar robotic arm, and compare it to a well-established analytical approach.
* 6 pages, 8 figures
View paper on