 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvidential Occupancy Grid Map Augmentation using Deep Learning
Paper and Code
Dec 05, 2018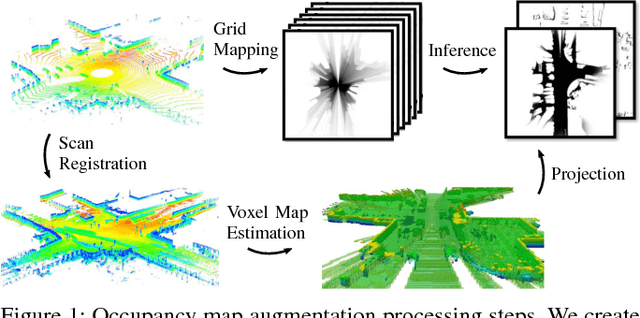
A detailed environment representation is a crucial component of automated vehicles. Using single range sensor scans, data is often too sparse and subject to occlusions. Therefore, we present a method to augment occupancy grid maps from single views to be similar to evidential occupancy maps acquired from different views using Deep Learning. To accomplish this, we estimate motion between subsequent range sensor measurements and create an evidential 3D voxel map in an extensive post-processing step. Within this voxel map, we explicitly model uncertainty using evidence theory and create a 2D projection using combination rules. As input for our neural networks, we use a multi-layer grid map consisting of the three features detections, transmissions and intensity, each for ground and non-ground measurements. Finally, we perform a quantitative and qualitative evaluation which shows that different network architectures accurately infer evidential measures in real-time.