 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Fully Environment-Aware UAVs: Real-Time Path Planning with Online 3D Wind Field Prediction in Complex Terrain
Paper and Code
Dec 10, 2017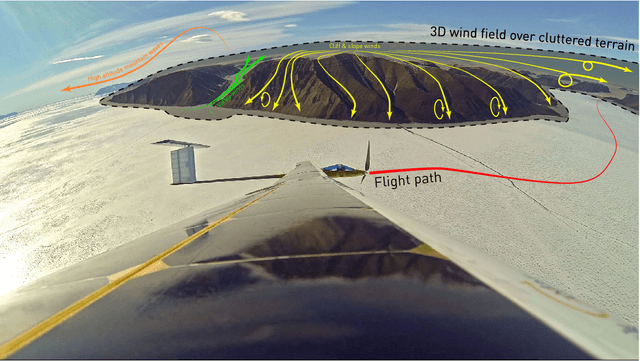
Today, low-altitude fixed-wing Unmanned Aerial Vehicles (UAVs) are largely limited to primitively follow user-defined waypoints. To allow fully-autonomous remote missions in complex environments, real-time environment-aware navigation is required both with respect to terrain and strong wind drafts. This paper presents two relevant initial contributions: First, the literature's first-ever 3D wind field prediction method which can run in real time onboard a UAV is presented. The approach retrieves low-resolution global weather data, and uses potential flow theory to adjust the wind field such that terrain boundaries, mass conservation, and the atmospheric stratification are observed. A comparison with 1D LIDAR data shows an overall wind error reduction of 23% with respect to the zero-wind assumption that is mostly used for UAV path planning today. However, given that the vertical winds are not resolved accurately enough further research is required and identified. Second, a sampling-based path planner that considers the aircraft dynamics in non-uniform wind iteratively via Dubins airplane paths is presented. Performance optimizations, e.g. obstacle-aware sampling and fast 2.5D-map collision checks, render the planner 50% faster than the Open Motion Planning Library (OMPL) implementation. Test cases in Alpine terrain show that the wind-aware planning performs up to 50x less iterations than shortest-path planning and is thus slower in low winds, but that it tends to deliver lower-cost paths in stronger winds. More importantly, in contrast to the shortest-path planner, it always delivers collision-free paths. Overall, our initial research demonstrates the feasibility of 3D wind field prediction from a UAV and the advantages of wind-aware planning. This paves the way for follow-up research on fully-autonomous environment-aware navigation of UAVs in real-life missions and complex terrain.