 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROAD: Reality Oriented Adaptation for Semantic Segmentation of Urban Scenes
Paper and Code
Apr 07, 2018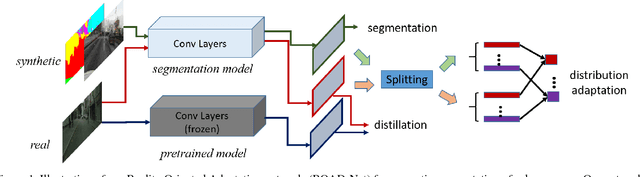
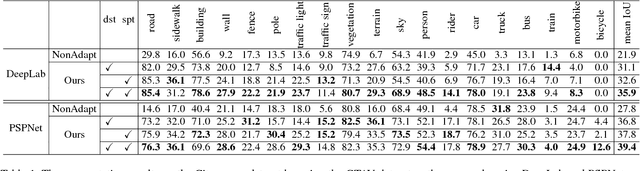
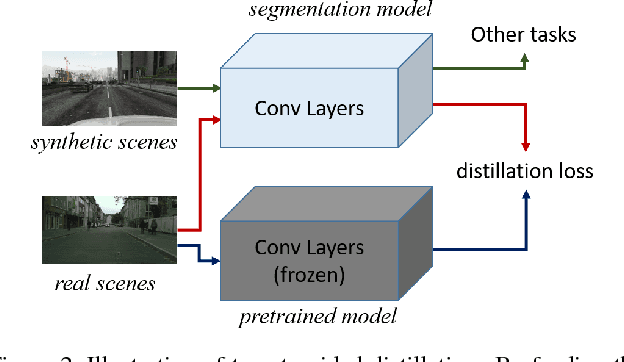
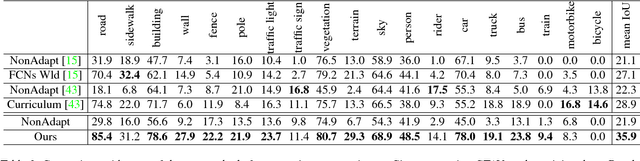
Exploiting synthetic data to learn deep models has attracted increasing attention in recent years. However, the intrinsic domain difference between synthetic and real images usually causes a significant performance drop when applying the learned model to real world scenarios. This is mainly due to two reasons: 1) the model overfits to synthetic images, making the convolutional filters incompetent to extract informative representation for real images; 2) there is a distribution difference between synthetic and real data, which is also known as the domain adaptation problem. To this end, we propose a new reality oriented adaptation approach for urban scene semantic segmentation by learning from synthetic data. First, we propose a target guided distillation approach to learn the real image style, which is achieved by training the segmentation model to imitate a pretrained real style model using real images. Second, we further take advantage of the intrinsic spatial structure presented in urban scene images, and propose a spatial-aware adaptation scheme to effectively align the distribution of two domains. These two modules can be readily integrated with existing state-of-the-art semantic segmentation networks to improve their generalizability when adapting from synthetic to real urban scenes. We evaluate the proposed method on Cityscapes dataset by adapting from GTAV and SYNTHIA datasets, where the results demonstrate the effectiveness of our method.