 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Synthetic Control
Paper and Code
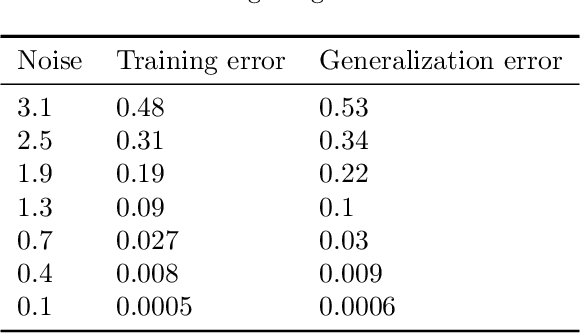
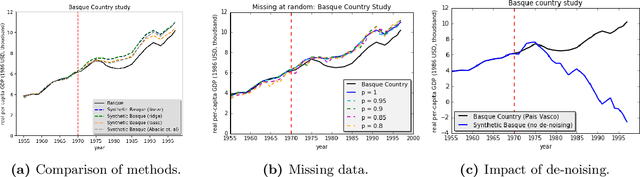
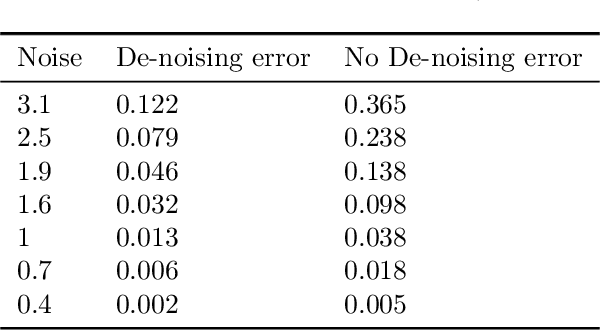
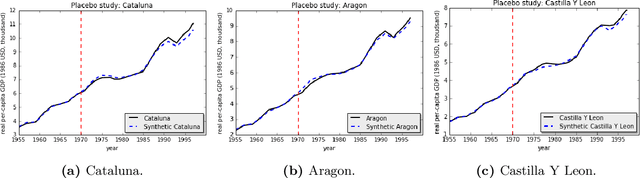
We present a robust generalization of the synthetic control method for comparative case studies. Like the classical method, we present an algorithm to estimate the unobservable counterfactual of a treatment unit. A distinguishing feature of our algorithm is that of de-noising the data matrix via singular value thresholding, which renders our approach robust in multiple facets: it automatically identifies a good subset of donors, overcomes the challenges of missing data, and continues to work well in settings where covariate information may not be provided. To begin, we establish the condition under which the fundamental assumption in synthetic control-like approaches holds, i.e. when the linear relationship between the treatment unit and the donor pool prevails in both the pre- and post-intervention periods. We provide the first finite sample analysis for a broader class of models, the Latent Variable Model, in contrast to Factor Models previously considered in the literature. Further, we show that our de-noising procedure accurately imputes missing entries, producing a consistent estimator of the underlying signal matrix provided $p = \Omega( T^{-1 + \zeta})$ for some $\zeta > 0$; here, $p$ is the fraction of observed data and $T$ is the time interval of interest. Under the same setting, we prove that the mean-squared-error (MSE) in our prediction estimation scales as $O(\sigma^2/p + 1/\sqrt{T})$, where $\sigma^2$ is the noise variance. Using a data aggregation method, we show that the MSE can be made as small as $O(T^{-1/2+\gamma})$ for any $\gamma \in (0, 1/2)$, leading to a consistent estimator. We also introduce a Bayesian framework to quantify the model uncertainty through posterior probabilities. Our experiments, using both real-world and synthetic datasets, demonstrate that our robust generalization yields an improvement over the classical synthetic control method.