 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Driver Attention in Critical Situations
Paper and Code



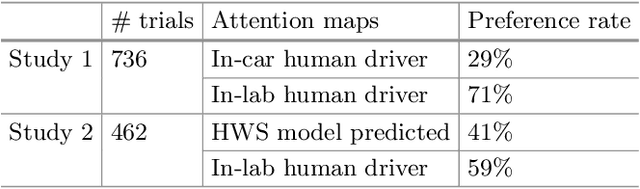
Robust driver attention prediction for critical situations is a challenging computer vision problem, yet essential for autonomous driving. Because critical driving moments are so rare, collecting enough data for these situations is difficult with the conventional in-car data collection protocol---tracking eye movements during driving. Here, we first propose a new in-lab driver attention collection protocol and introduce a new driver attention dataset built upon braking event videos selected from a large-scale, crowd-sourced driving video dataset. We further propose Human Weighted Sampling (HWS) method, which uses human gaze behavior to identify crucial frames of a driving dataset and weights them heavily during model training. With our dataset and HWS, we built a driver attention prediction model that outperforms the state-of-the-art and demonstrates sophisticated behaviors, like attending to crossing pedestrians but not giving false alarms to pedestrians safely walking on the sidewalk. Its prediction results are nearly indistinguishable from ground-truth to humans. Although only being trained with our in-lab attention data, the model also predicts in-car driver attention data of routine driving with state-of-the-art accuracy. This result not only demonstrates the performance of our model but also proves the validity and usefulness of our dataset and data collection protocol.