 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDoShiCo Challenge: Domain Shift in Control Prediction
Paper and Code

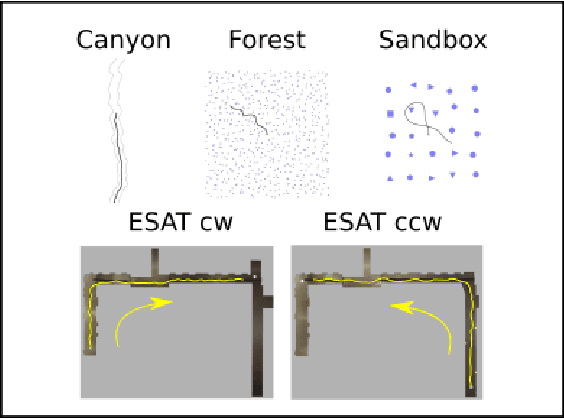
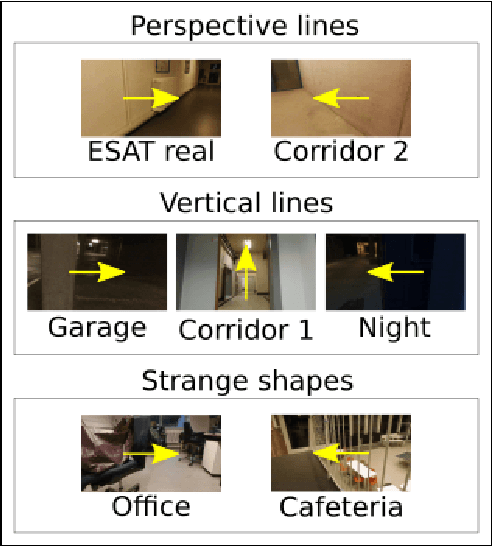
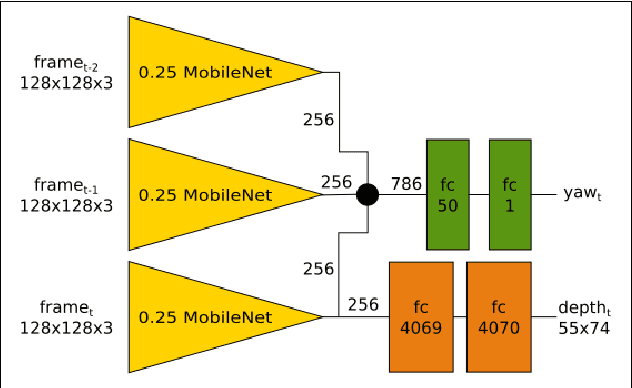
Training deep neural network policies end-to-end for real-world applications so far requires big demonstration datasets in the real world or big sets consisting of a large variety of realistic and closely related 3D CAD models. These real or virtual data should, moreover, have very similar characteristics to the conditions expected at test time. These stringent requirements and the time consuming data collection processes that they entail, are currently the most important impediment that keeps deep reinforcement learning from being deployed in real-world applications. Therefore, in this work we advocate an alternative approach, where instead of avoiding any domain shift by carefully selecting the training data, the goal is to learn a policy that can cope with it. To this end, we propose the DoShiCo challenge: to train a model in very basic synthetic environments, far from realistic, in a way that it can be applied in more realistic environments as well as take the control decisions on real-world data. In particular, we focus on the task of collision avoidance for drones. We created a set of simulated environments that can be used as benchmark and implemented a baseline method, exploiting depth prediction as an auxiliary task to help overcome the domain shift. Even though the policy is trained in very basic environments, it can learn to fly without collisions in a very different realistic simulated environment. Of course several benchmarks for reinforcement learning already exist - but they never include a large domain shift. On the other hand, several benchmarks in computer vision focus on the domain shift, but they take the form of a static datasets instead of simulated environments. In this work we claim that it is crucial to take the two challenges together in one benchmark.