 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBacktracking Regression Forests for Accurate Camera Relocalization
Paper and Code
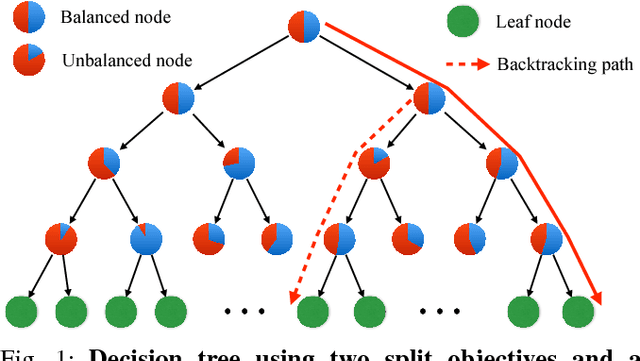
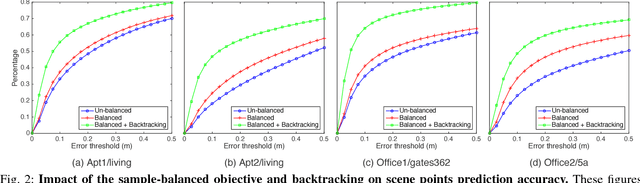
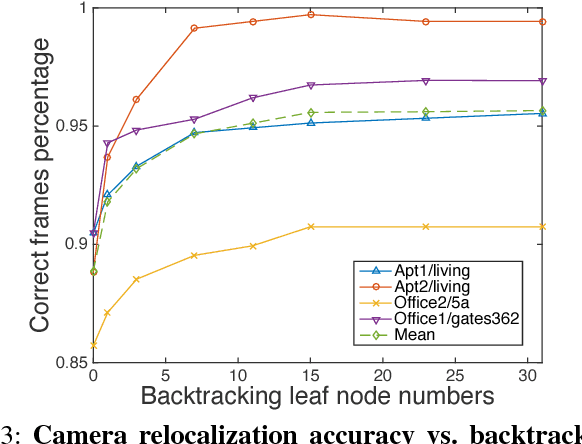
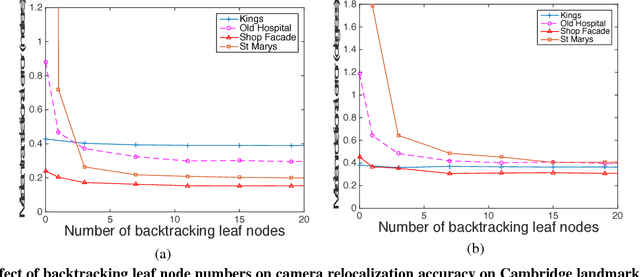
Camera relocalization plays a vital role in many robotics and computer vision tasks, such as global localization, recovery from tracking failure, and loop closure detection. Recent random forests based methods directly predict 3D world locations for 2D image locations to guide the camera pose optimization. During training, each tree greedily splits the samples to minimize the spatial variance. However, these greedy splits often produce uneven sub-trees in training or incorrect 2D-3D correspondences in testing. To address these problems, we propose a sample-balanced objective to encourage equal numbers of samples in the left and right sub-trees, and a novel backtracking scheme to remedy the incorrect 2D-3D correspondence predictions. Furthermore, we extend the regression forests based methods to use local features in both training and testing stages for outdoor RGB-only applications. Experimental results on publicly available indoor and outdoor datasets demonstrate the efficacy of our approach, which shows superior or on-par accuracy with several state-of-the-art methods.