 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSqueezeSeg: Convolutional Neural Nets with Recurrent CRF for Real-Time Road-Object Segmentation from 3D LiDAR Point Cloud
Paper and Code
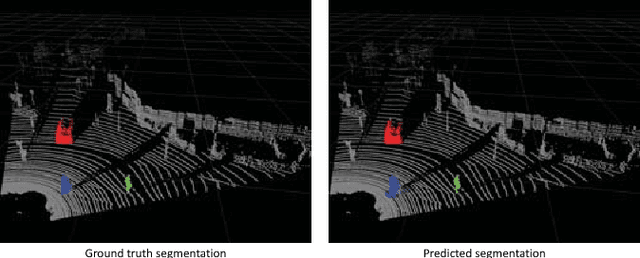

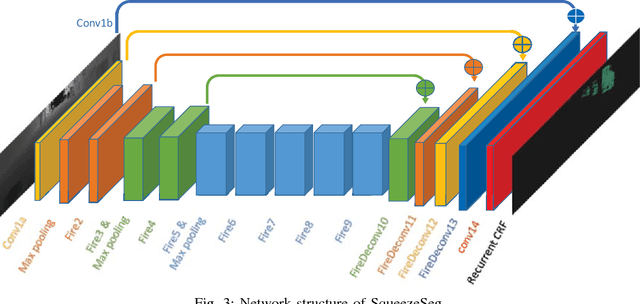
In this paper, we address semantic segmentation of road-objects from 3D LiDAR point clouds. In particular, we wish to detect and categorize instances of interest, such as cars, pedestrians and cyclists. We formulate this problem as a point- wise classification problem, and propose an end-to-end pipeline called SqueezeSeg based on convolutional neural networks (CNN): the CNN takes a transformed LiDAR point cloud as input and directly outputs a point-wise label map, which is then refined by a conditional random field (CRF) implemented as a recurrent layer. Instance-level labels are then obtained by conventional clustering algorithms. Our CNN model is trained on LiDAR point clouds from the KITTI dataset, and our point-wise segmentation labels are derived from 3D bounding boxes from KITTI. To obtain extra training data, we built a LiDAR simulator into Grand Theft Auto V (GTA-V), a popular video game, to synthesize large amounts of realistic training data. Our experiments show that SqueezeSeg achieves high accuracy with astonishingly fast and stable runtime (8.7 ms per frame), highly desirable for autonomous driving applications. Furthermore, additionally training on synthesized data boosts validation accuracy on real-world data. Our source code and synthesized data will be open-sourced.