 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Fast 3D Scan Alignment using Mutual Information
Paper and Code
Sep 20, 2017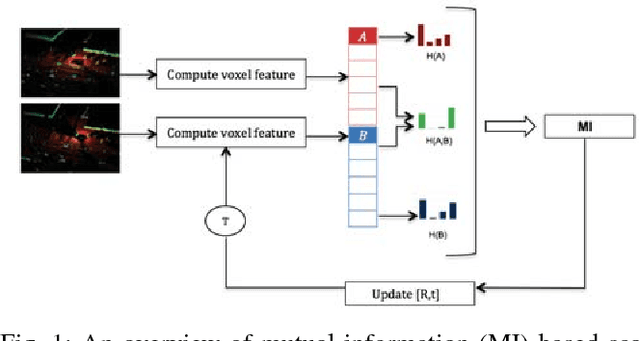
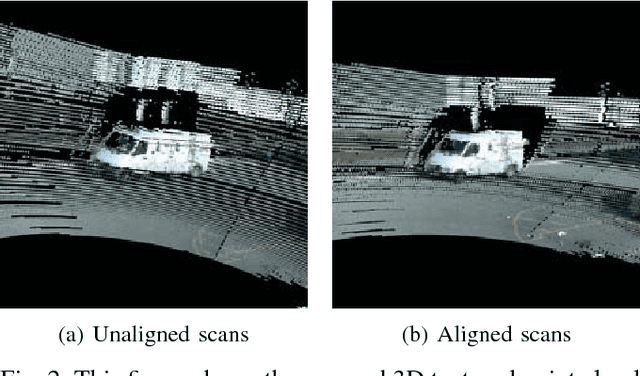
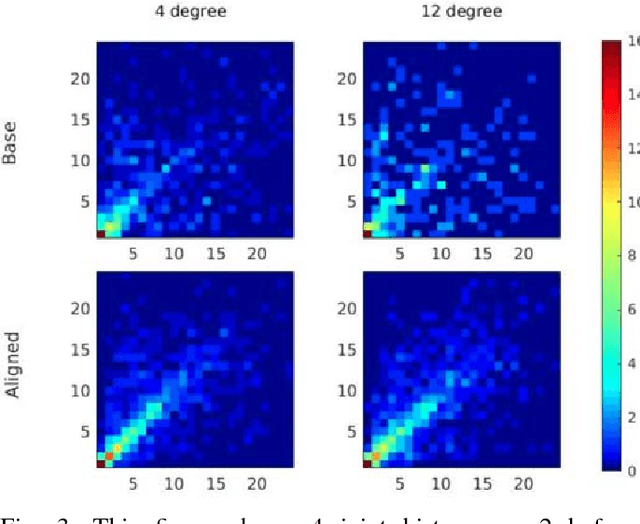

This paper presents a mutual information (MI) based algorithm for the estimation of full 6-degree-of-freedom (DOF) rigid body transformation between two overlapping point clouds. We first divide the scene into a 3D voxel grid and define simple to compute features for each voxel in the scan. The two scans that need to be aligned are considered as a collection of these features and the MI between these voxelized features is maximized to obtain the correct alignment of scans. We have implemented our method with various simple point cloud features (such as number of points in voxel, variance of z-height in voxel) and compared the performance of the proposed method with existing point-to-point and point-to- distribution registration methods. We show that our approach has an efficient and fast parallel implementation on GPU, and evaluate the robustness and speed of the proposed algorithm on two real-world datasets which have variety of dynamic scenes from different environments.