 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperspectral Light Field Stereo Matching
Paper and Code
Sep 04, 2017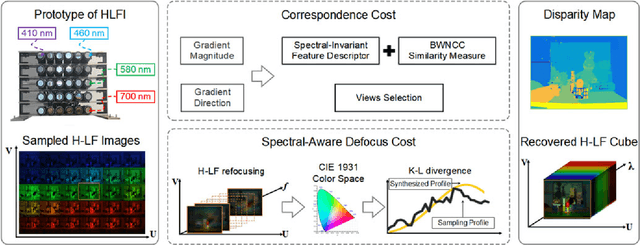
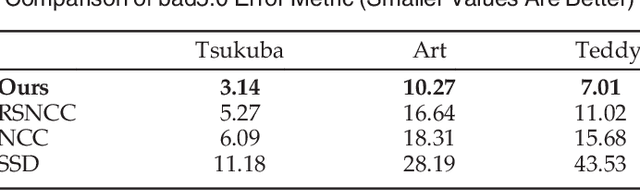
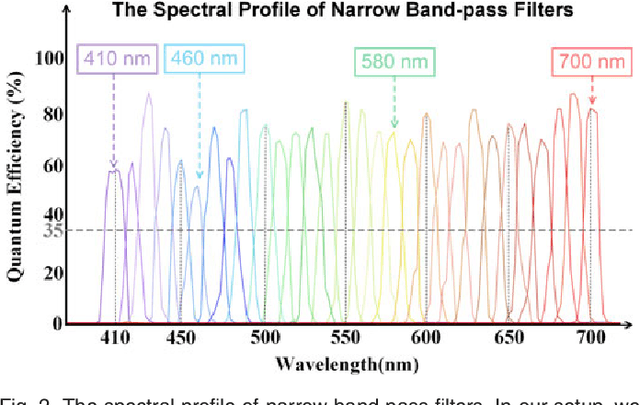
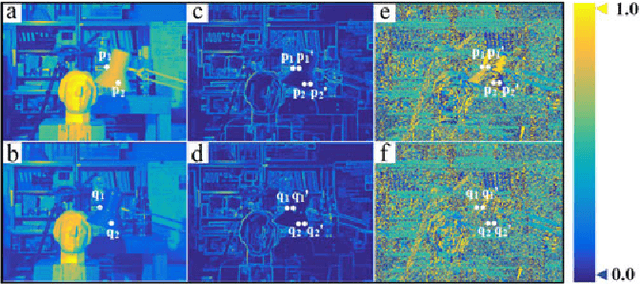
In this paper, we describe how scene depth can be extracted using a hyperspectral light field capture (H-LF) system. Our H-LF system consists of a 5 x 6 array of cameras, with each camera sampling a different narrow band in the visible spectrum. There are two parts to extracting scene depth. The first part is our novel cross-spectral pairwise matching technique, which involves a new spectral-invariant feature descriptor and its companion matching metric we call bidirectional weighted normalized cross correlation (BWNCC). The second part, namely, H-LF stereo matching, uses a combination of spectral-dependent correspondence and defocus cues that rely on BWNCC. These two new cost terms are integrated into a Markov Random Field (MRF) for disparity estimation. Experiments on synthetic and real H-LF data show that our approach can produce high-quality disparity maps. We also show that these results can be used to produce the complete plenoptic cube in addition to synthesizing all-focus and defocused color images under different sensor spectral responses.