 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Algorithm for Supervised Driving of Cooperative Semi-Autonomous Vehicles (Extended)
Paper and Code
Jun 25, 2017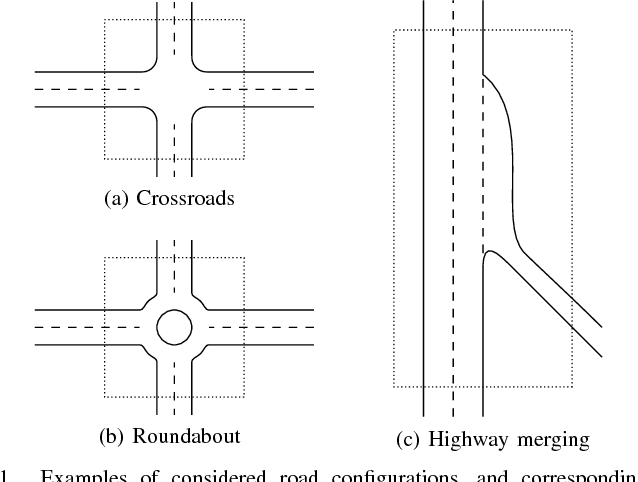
Before reaching full autonomy, vehicles will gradually be equipped with more and more advanced driver assistance systems (ADAS), effectively rendering them semi-autonomous. However, current ADAS technologies seem unable to handle complex traffic situations, notably when dealing with vehicles arriving from the sides, either at intersections or when merging on highways. The high rate of accidents in these settings prove that they constitute difficult driving situations. Moreover, intersections and merging lanes are often the source of important traffic congestion and, sometimes, deadlocks. In this article, we propose a cooperative framework to safely coordinate semi-autonomous vehicles in such settings, removing the risk of collision or deadlocks while remaining compatible with human driving. More specifically, we present a supervised coordination scheme that overrides control inputs from human drivers when they would result in an unsafe or blocked situation. To avoid unnecessary intervention and remain compatible with human driving, overriding only occurs when collisions or deadlocks are imminent. In this case, safe overriding controls are chosen while ensuring they deviate minimally from those originally requested by the drivers. Simulation results based on a realistic physics simulator show that our approach is scalable to real-world scenarios, and computations can be performed in real-time on a standard computer for up to a dozen simultaneous vehicles.