 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParallel Structure from Motion from Local Increment to Global Averaging
Paper and Code
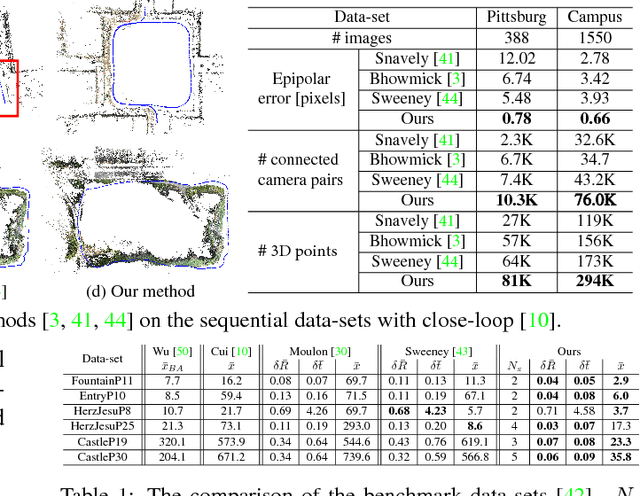

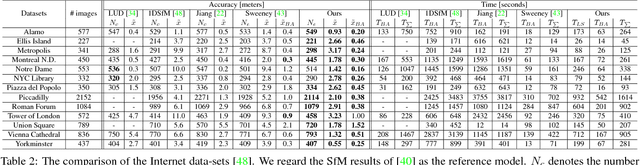
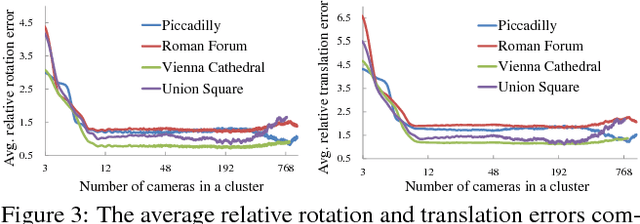
In this paper, we tackle the accurate and consistent Structure from Motion (SfM) problem, in particular camera registration, far exceeding the memory of a single computer in parallel. Different from the previous methods which drastically simplify the parameters of SfM and sacrifice the accuracy of the final reconstruction, we try to preserve the connectivities among cameras by proposing a camera clustering algorithm to divide a large SfM problem into smaller sub-problems in terms of camera clusters with overlapping. We then exploit a hybrid formulation that applies the relative poses from local incremental SfM into a global motion averaging framework and produce accurate and consistent global camera poses. Our scalable formulation in terms of camera clusters is highly applicable to the whole SfM pipeline including track generation, local SfM, 3D point triangulation and bundle adjustment. We are even able to reconstruct the camera poses of a city-scale data-set containing more than one million high-resolution images with superior accuracy and robustness evaluated on benchmark, Internet, and sequential data-sets.