 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow hard is it to cross the room? -- Training Neural Networks to steer a UAV
Paper and Code
Feb 24, 2017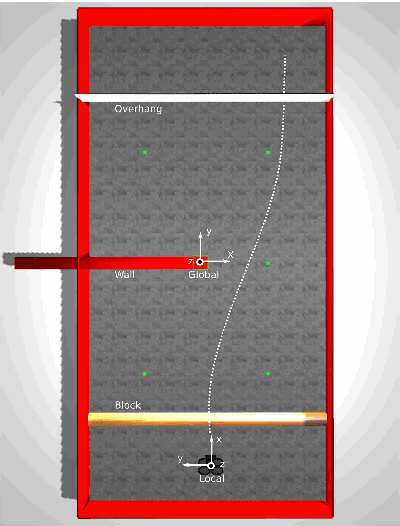
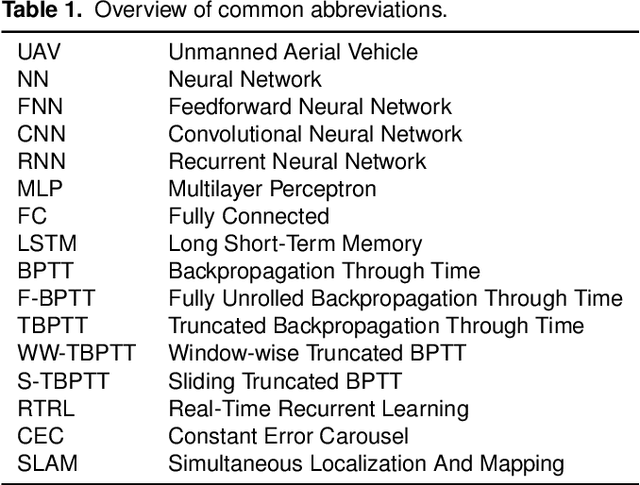
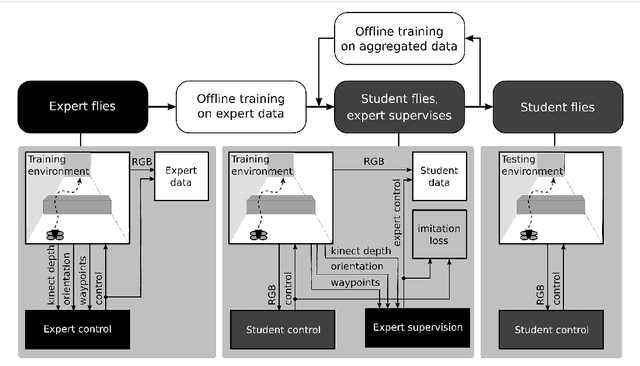
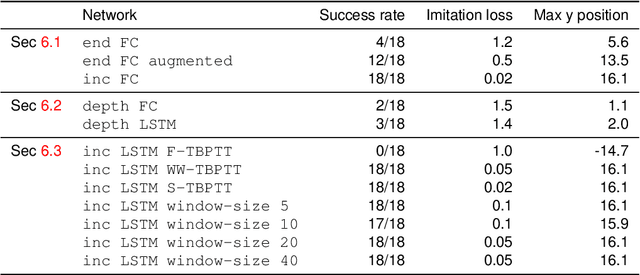
This work explores the feasibility of steering a drone with a (recurrent) neural network, based on input from a forward looking camera, in the context of a high-level navigation task. We set up a generic framework for training a network to perform navigation tasks based on imitation learning. It can be applied to both aerial and land vehicles. As a proof of concept we apply it to a UAV (Unmanned Aerial Vehicle) in a simulated environment, learning to cross a room containing a number of obstacles. So far only feedforward neural networks (FNNs) have been used to train UAV control. To cope with more complex tasks, we propose the use of recurrent neural networks (RNN) instead and successfully train an LSTM (Long-Short Term Memory) network for controlling UAVs. Vision based control is a sequential prediction problem, known for its highly correlated input data. The correlation makes training a network hard, especially an RNN. To overcome this issue, we investigate an alternative sampling method during training, namely window-wise truncated backpropagation through time (WW-TBPTT). Further, end-to-end training requires a lot of data which often is not available. Therefore, we compare the performance of retraining only the Fully Connected (FC) and LSTM control layers with networks which are trained end-to-end. Performing the relatively simple task of crossing a room already reveals important guidelines and good practices for training neural control networks. Different visualizations help to explain the behavior learned.