 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing and Walking Using Full Dynamics LQR Control With Contact Constraints
Paper and Code
Jan 27, 2017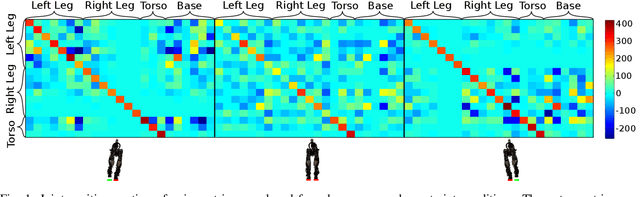
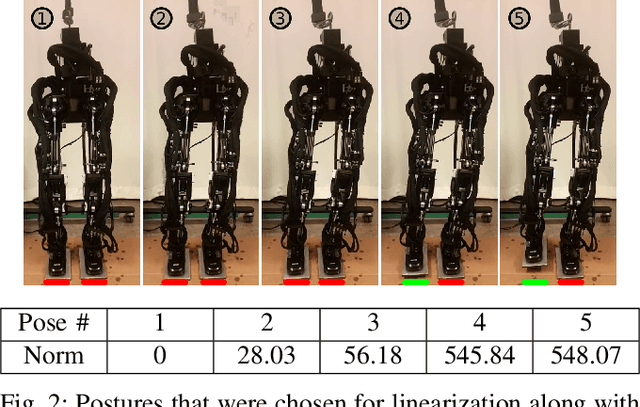
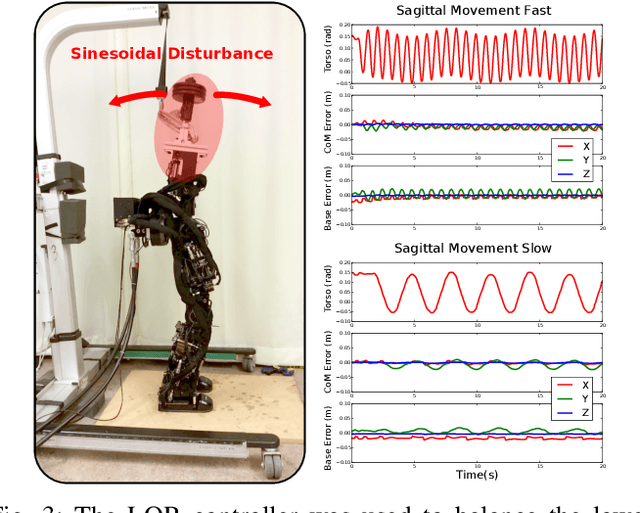
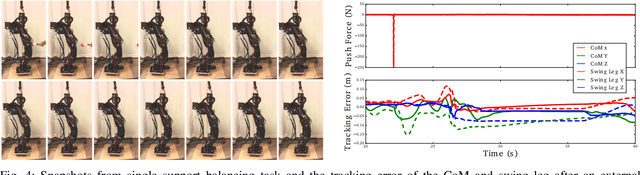
Torque control algorithms which consider robot dynamics and contact constraints are important for creating dynamic behaviors for humanoids. As computational power increases, algorithms tend to also increase in complexity. However, it is not clear how much complexity is really required to create controllers which exhibit good performance. In this paper, we study the capabilities of a simple approach based on contact consistent LQR controllers designed around key poses to control various tasks on a humanoid robot. We present extensive experimental results on a hydraulic, torque controlled humanoid performing balancing and stepping tasks. This feedback control approach captures the necessary synergies between the DoFs of the robot to guarantee good control performance. We show that for the considered tasks, it is only necessary to re-linearize the dynamics of the robot at different contact configurations and that increasing the number of LQR controllers along desired trajectories does not improve performance. Our result suggest that very simple controllers can yield good performance competitive with current state of the art, but more complex, optimization-based whole-body controllers. A video of the experiments can be found at https://youtu.be/5T08CNKV1hw.