 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Optical flow-based Video Stabilization for Unmanned Aerial Vehicles
Paper and Code
Jan 13, 2017
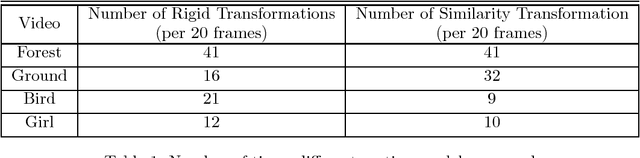

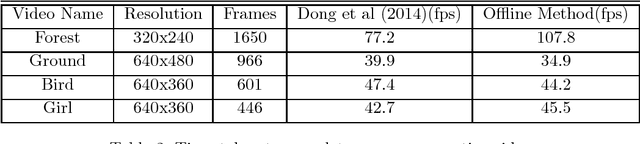
This paper describes the development of a novel algorithm to tackle the problem of real-time video stabilization for unmanned aerial vehicles (UAVs). There are two main components in the algorithm: (1) By designing a suitable model for the global motion of UAV, the proposed algorithm avoids the necessity of estimating the most general motion model, projective transformation, and considers simpler motion models, such as rigid transformation and similarity transformation. (2) To achieve a high processing speed, optical-flow based tracking is employed in lieu of conventional tracking and matching methods used by state-of-the-art algorithms. These two new ideas resulted in a real-time stabilization algorithm, developed over two phases. Stage I considers processing the whole sequence of frames in the video while achieving an average processing speed of 50fps on several publicly available benchmark videos. Next, Stage II undertakes the task of real-time video stabilization using a multi-threading implementation of the algorithm designed in Stage I.