 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSqueezeDet: Unified, Small, Low Power Fully Convolutional Neural Networks for Real-Time Object Detection for Autonomous Driving
Paper and Code
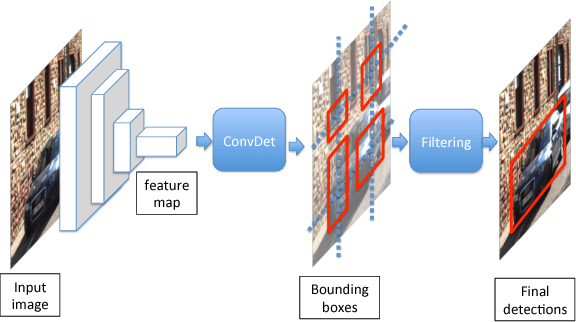
Object detection is a crucial task for autonomous driving. In addition to requiring high accuracy to ensure safety, object detection for autonomous driving also requires real-time inference speed to guarantee prompt vehicle control, as well as small model size and energy efficiency to enable embedded system deployment. In this work, we propose SqueezeDet, a fully convolutional neural network for object detection that aims to simultaneously satisfy all of the above constraints. In our network we use convolutional layers not only to extract feature maps, but also as the output layer to compute bounding boxes and class probabilities. The detection pipeline of our model only contains a single forward pass of a neural network, thus it is extremely fast. Our model is fully-convolutional, which leads to small model size and better energy efficiency. Finally, our experiments show that our model is very accurate, achieving state-of-the-art accuracy on the KITTI benchmark.