 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReachable Set Approach to Collision Avoidance for UAVs
Paper and Code
Sep 26, 2016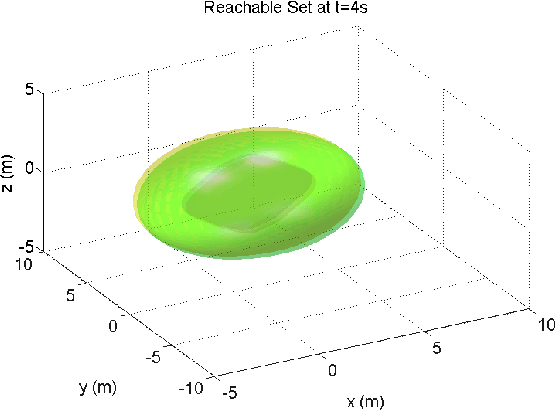
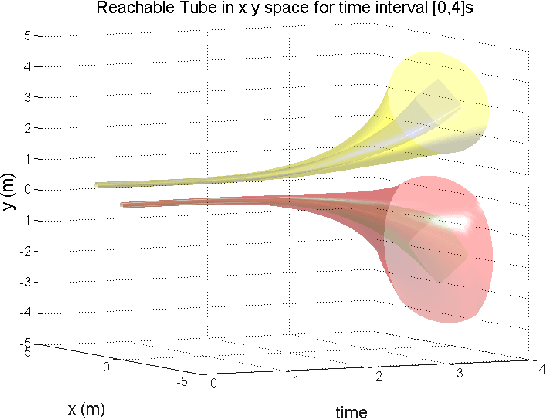
In this paper, we propose a reachable set based collision avoidance algorithm for unmanned aerial vehicles (UAVs). UAVs have been deployed for agriculture research and management, surveillance and sensor coverage for threat detection and disaster search and rescue operations. It is essential for the aircraft to have on-board collision avoidance capability to guarantee safety. Instead of the traditional approach of collision avoidance between trajectories, we propose a collision avoidance scheme based on reachable sets and tubes. We then formulate the problem as a convex optimization problem seeking suitable control constraint sets for participating aircraft. We have applied the approach on a case study of two quadrotors and two fix-wing aircraft collision avoidance scenario.