 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Algorithms for 3D Symmetric Formations in Robotic Networks: a Contraction Theory Approach
Paper and Code
Nov 09, 2015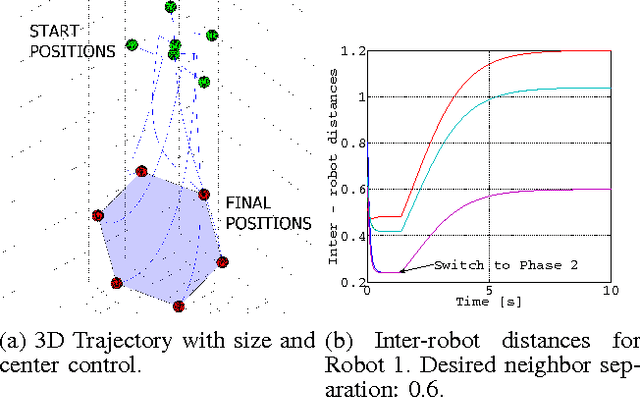
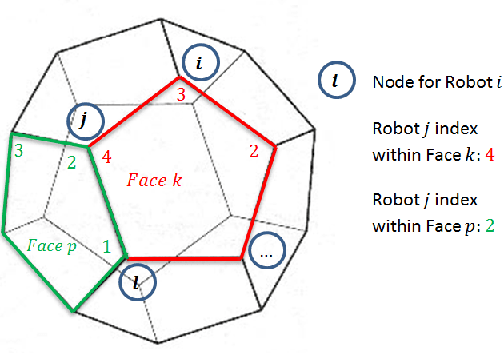
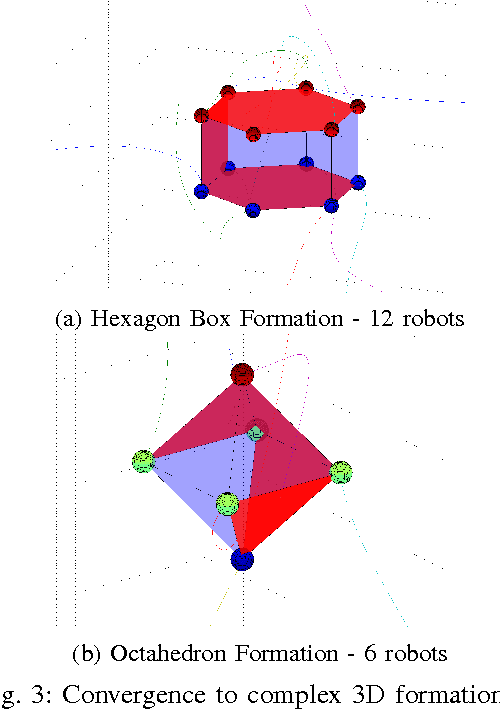
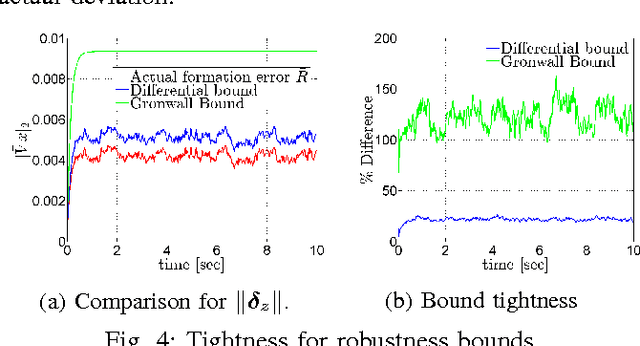
This paper presents decentralized algorithms for formation control of multiple robots in three dimensions. Specifically, we leverage the mathematical properties of cyclic pursuit along with results from contraction and partial contraction theory to design decentralized control algorithms that ensure global convergence to symmetric formations. We first consider regular polygon formations as a base case, and then extend the results to Johnson solid and other polygonal mesh formations. The algorithms are further augmented to allow control over formation size and avoid collisions with other robots in the formation. The robustness properties of the algorithms are assessed in the presence of bounded additive disturbances and their effect on the quality of the formation is quantified. Finally, we present a general methodology for embedding the control laws on complex dynamical systems, in this case, quadcopters, and validate this approach via simulations and experiments on a fleet of quadcopters.