 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Dataset for Improved RGBD-based Object Detection and Pose Estimation for Warehouse Pick-and-Place
Paper and Code
Feb 20, 2016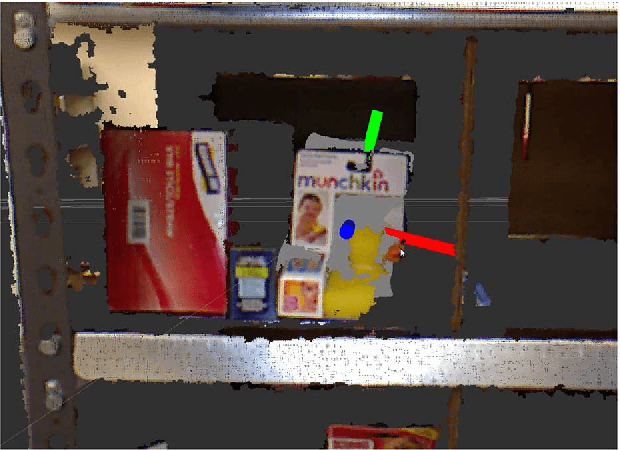

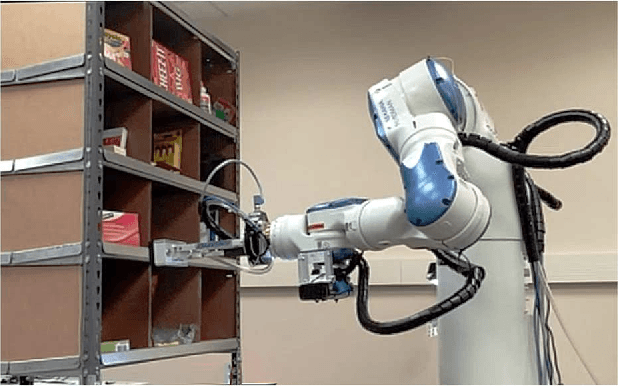
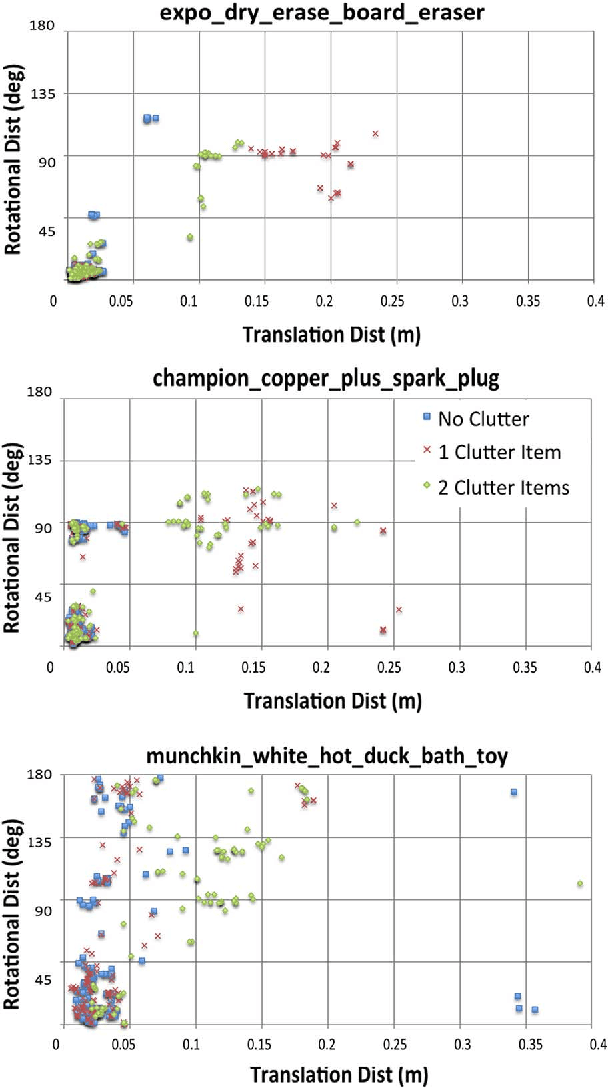
An important logistics application of robotics involves manipulators that pick-and-place objects placed in warehouse shelves. A critical aspect of this task corre- sponds to detecting the pose of a known object in the shelf using visual data. Solving this problem can be assisted by the use of an RGB-D sensor, which also provides depth information beyond visual data. Nevertheless, it remains a challenging problem since multiple issues need to be addressed, such as low illumination inside shelves, clutter, texture-less and reflective objects as well as the limitations of depth sensors. This paper provides a new rich data set for advancing the state-of-the-art in RGBD- based 3D object pose estimation, which is focused on the challenges that arise when solving warehouse pick- and-place tasks. The publicly available data set includes thousands of images and corresponding ground truth data for the objects used during the first Amazon Picking Challenge at different poses and clutter conditions. Each image is accompanied with ground truth information to assist in the evaluation of algorithms for object detection. To show the utility of the data set, a recent algorithm for RGBD-based pose estimation is evaluated in this paper. Based on the measured performance of the algorithm on the data set, various modifications and improvements are applied to increase the accuracy of detection. These steps can be easily applied to a variety of different methodologies for object pose detection and improve performance in the domain of warehouse pick-and-place.