 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Modelling with a Handheld RGB-D Camera
Paper and Code
May 21, 2015
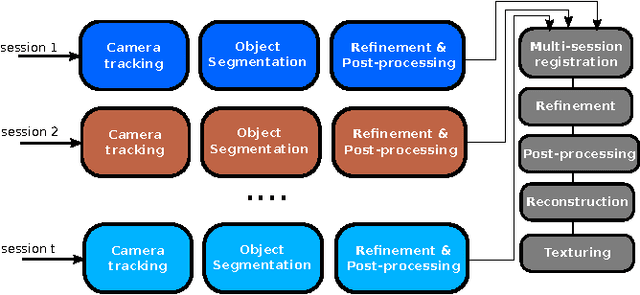
This work presents a flexible system to reconstruct 3D models of objects captured with an RGB-D sensor. A major advantage of the method is that our reconstruction pipeline allows the user to acquire a full 3D model of the object. This is achieved by acquiring several partial 3D models in different sessions that are automatically merged together to reconstruct a full model. In addition, the 3D models acquired by our system can be directly used by state-of-the-art object instance recognition and object tracking modules, providing object-perception capabilities for different applications, such as human-object interaction analysis or robot grasping. The system does not impose constraints in the appearance of objects (textured, untextured) nor in the modelling setup (moving camera with static object or a turn-table setup). The proposed reconstruction system has been used to model a large number of objects resulting in metrically accurate and visually appealing 3D models.