 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInferring Object Properties with a Tactile Sensing Array Given Varying Joint Stiffness and Velocity
Paper and Code
Nov 04, 2017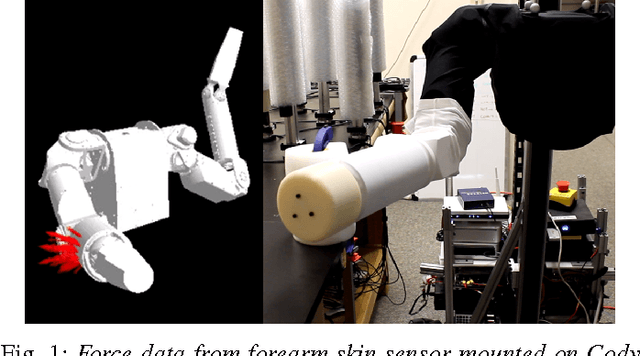
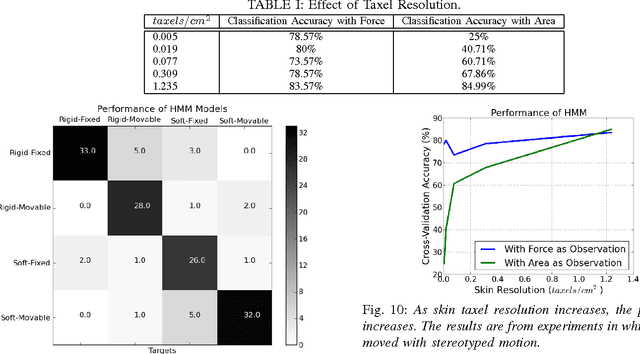
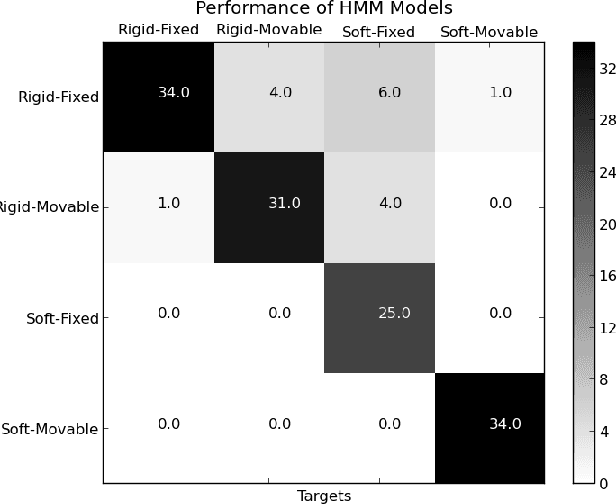
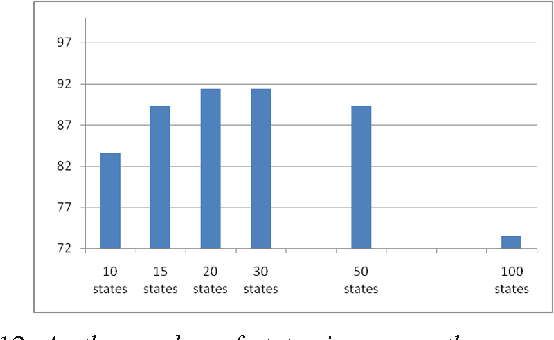
Whole-arm tactile sensing enables a robot to sense contact and infer contact properties across its entire arm. Within this paper, we demonstrate that using data-driven methods, a humanoid robot can infer mechanical properties of objects from contact with its forearm during a simple reaching motion. A key issue is the extent to which the performance of data-driven methods can generalize to robot actions that differ from those used during training. To investigate this, we developed an idealized physics-based lumped element model of a robot with a compliant joint making contact with an object. Using this physics-based model, we performed experiments with varied robot, object and environment parameters. We also collected data from a tactile-sensing forearm on a real robot as it made contact with various objects during a simple reaching motion with varied arm velocities and joint stiffnesses. The robot used one nearest neighbor classifiers (1-NN), hidden Markov models (HMMs), and long short-term memory (LSTM) networks to infer two object properties (hard vs. soft and moved vs. unmoved) based on features of time-varying tactile sensor data (maximum force, contact area, and contact motion). We found that, in contrast to 1-NN, the performance of LSTMs (with sufficient data availability) and multivariate HMMs successfully generalized to new robot motions with distinct velocities and joint stiffnesses. Compared to single features, using multiple features gave the best results for both experiments with physics-based models and a real-robot.