 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Metrics Matter! On the Incompatibility of Different Flavors of Replanning
Paper and Code
May 12, 2014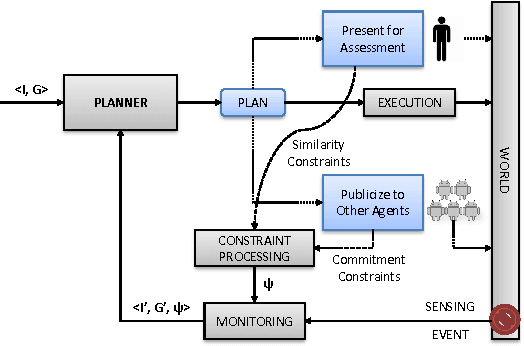
When autonomous agents are executing in the real world, the state of the world as well as the objectives of the agent may change from the agent's original model. In such cases, the agent's planning process must modify the plan under execution to make it amenable to the new conditions, and to resume execution. This brings up the replanning problem, and the various techniques that have been proposed to solve it. In all, three main techniques -- based on three different metrics -- have been proposed in prior automated planning work. An open question is whether these metrics are interchangeable; answering this requires a normalized comparison of the various replanning quality metrics. In this paper, we show that it is possible to support such a comparison by compiling all the respective techniques into a single substrate. Using this novel compilation, we demonstrate that these different metrics are not interchangeable, and that they are not good surrogates for each other. Thus we focus attention on the incompatibility of the various replanning flavors with each other, founded in the differences between the metrics that they respectively seek to optimize.