 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecentralized Rendezvous of Nonholonomic Robots with Sensing and Connectivity Constraints
Paper and Code
Feb 23, 2014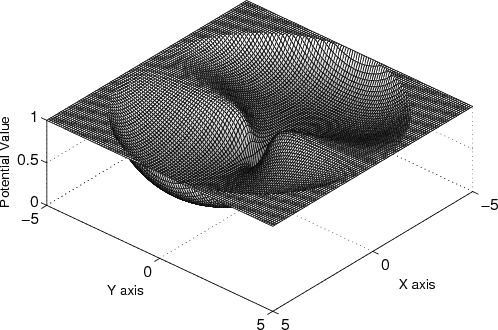
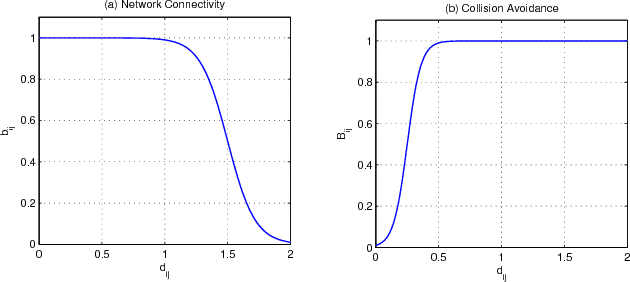
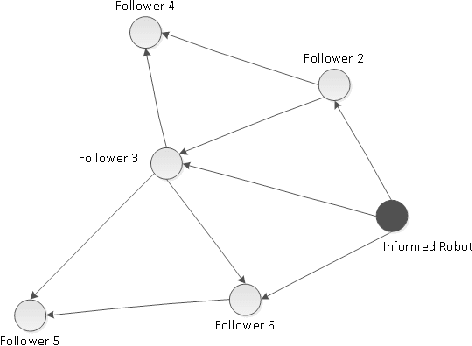
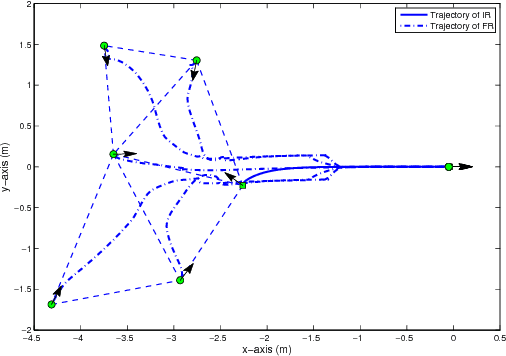
A group of wheeled robots with nonholonomic constraints is considered to rendezvous at a common specified setpoint with a desired orientation while maintaining network connectivity and ensuring collision avoidance within the robots. Given communication and sensing constraints for each robot, only a subset of the robots are aware or informed of the global destination, and the remaining robots must move within the network connectivity constraint so that the informed robots can guide the group to the goal. The mobile robots are also required to avoid collisions with each other outside a neighborhood of the common rendezvous point. To achieve the rendezvous control objective, decentralized time-varying controllers are developed based on a navigation function framework to steer the robots to perform rendezvous while preserving network connectivity and ensuring collision avoidance. Only local sensing feedback, which includes position feedback from immediate neighbors and absolute orientation measurement, is used to navigate the robots and enables radio silence during navigation. Simulation results demonstrate the performance of the developed approach.