Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematics analysis and three-dimensional simulation of the rehabilitation lower extremity exoskeleton robot
Paper and Code
Jan 25, 2014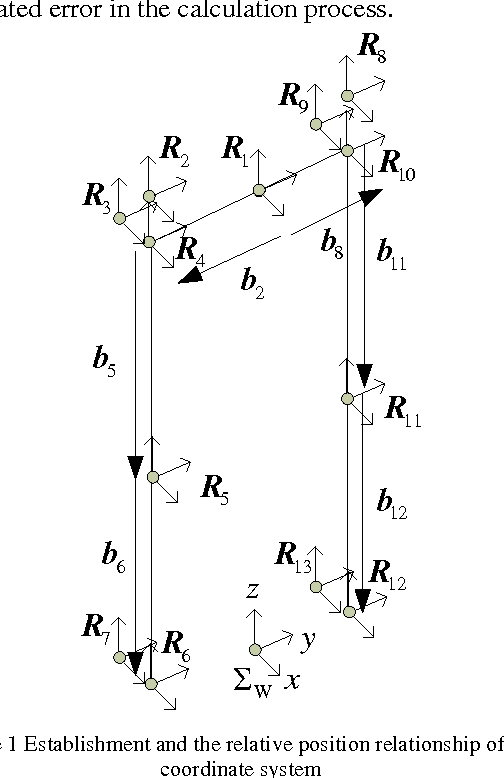
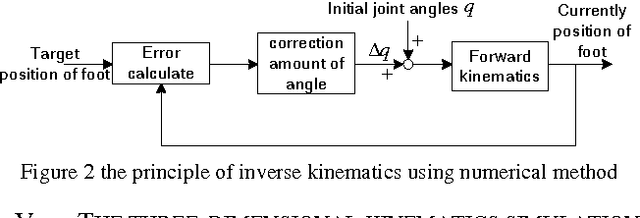
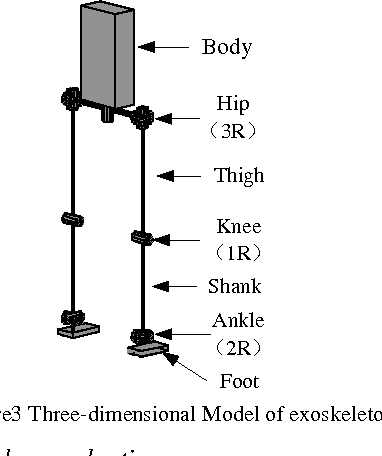
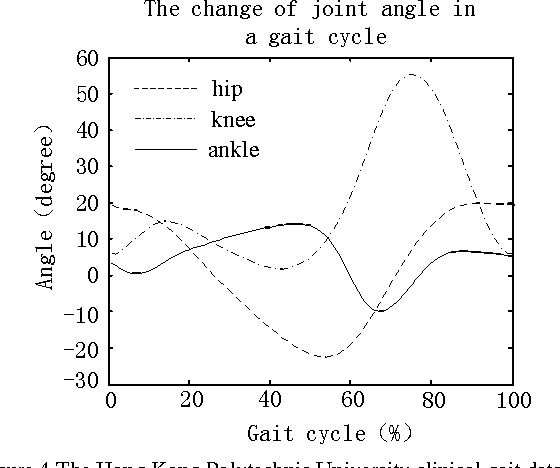
The kinematics recursive equation was built by using the modified D-H method after the structure of rehabilitation lower extremity exoskeleton was analyzed. The numerical algorithm of inverse kinematics was given too. Then the three-dimensional simulation model of the exoskeleton robot was built using MATLAB software, based on the model, 3D reappearance of a complete gait was achieved. Finally, the reliability of numerical algorithm of inverse kinematics was verified by the simulation result. All jobs above lay a foundation for developing a three-dimensional simulation platform of exoskeleton robot.
* The international conference on Soft Computing and Software
Engineering
View paper on