Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMemoryless Control Design for Persistent Surveillance under Safety Constraints
Paper and Code
Nov 08, 2012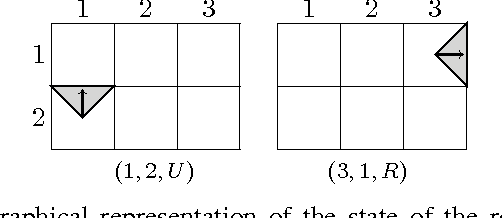
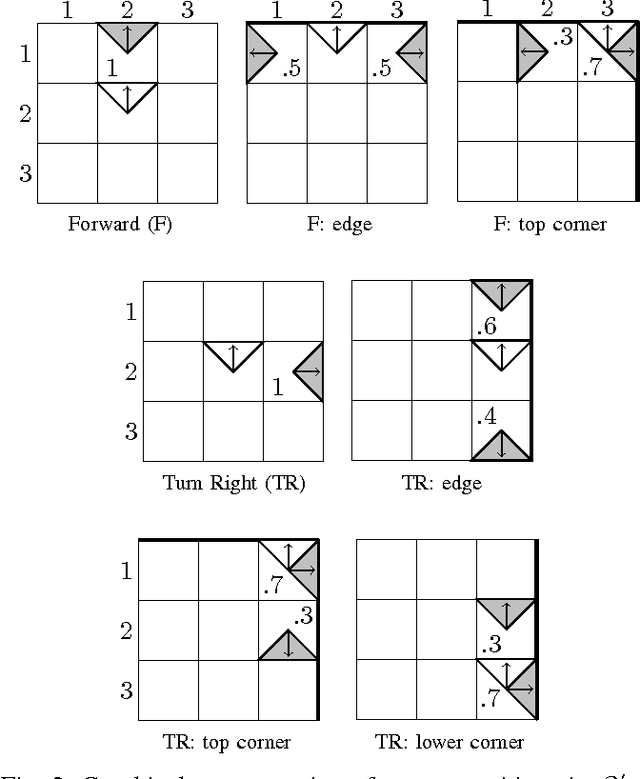
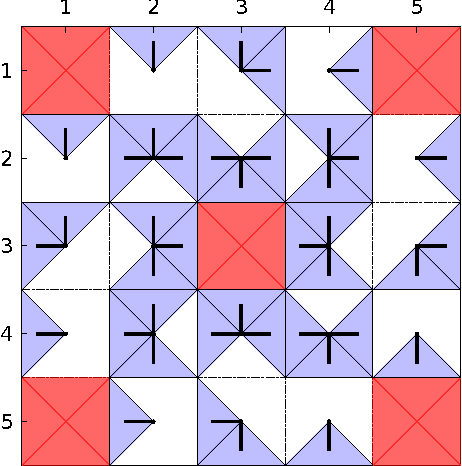
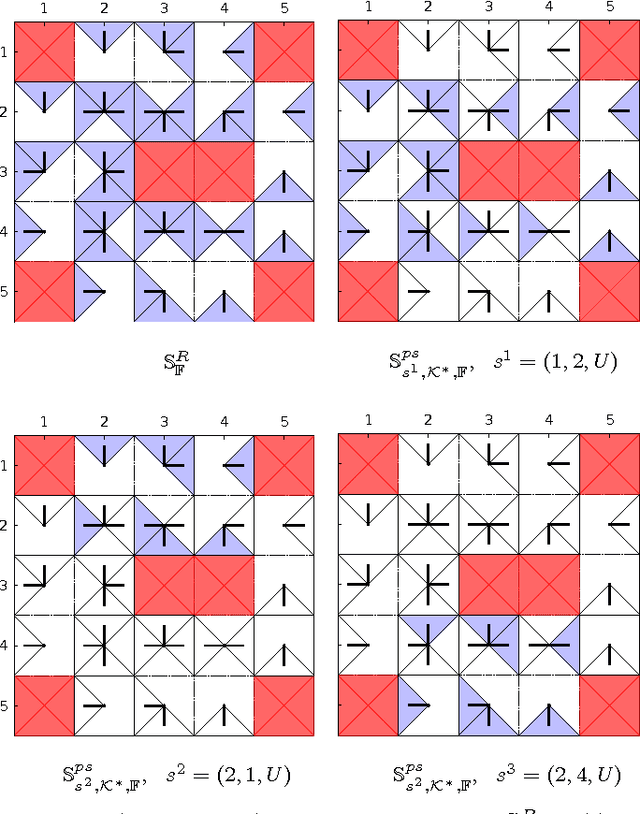
This paper deals with the design of time-invariant memoryless control policies for robots that move in a finite two- dimensional lattice and are tasked with persistent surveillance of an area in which there are forbidden regions. We model each robot as a controlled Markov chain whose state comprises its position in the lattice and the direction of motion. The goal is to find the minimum number of robots and an associated time-invariant memoryless control policy that guarantees that the largest number of states are persistently surveilled without ever visiting a forbidden state. We propose a design method that relies on a finitely parametrized convex program inspired by entropy maximization principles. Numerical examples are provided.
View paper on