 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDifference of Normals as a Multi-Scale Operator in Unorganized Point Clouds
Paper and Code
Sep 08, 2012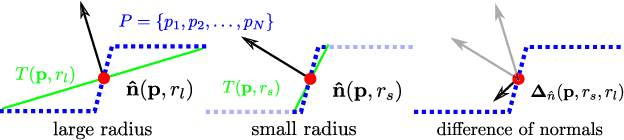
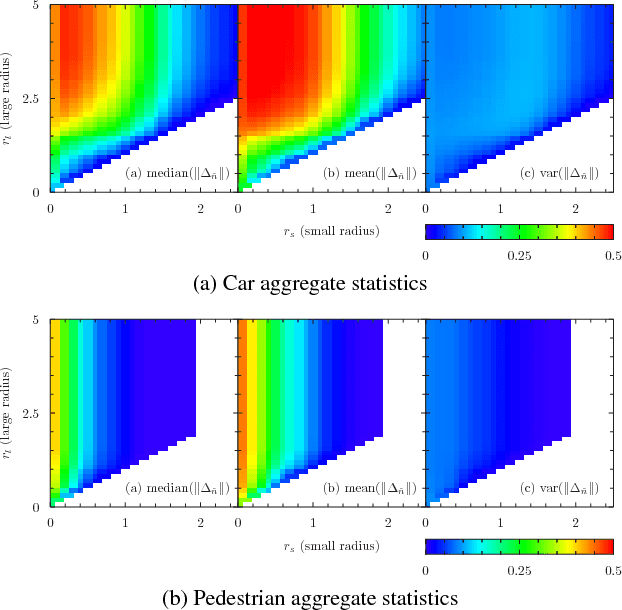
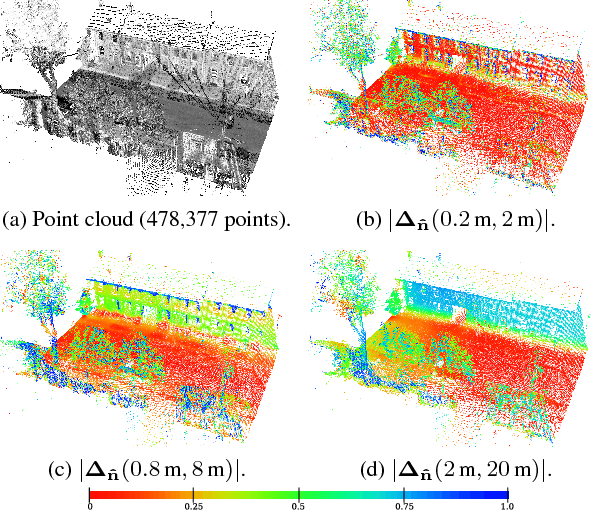
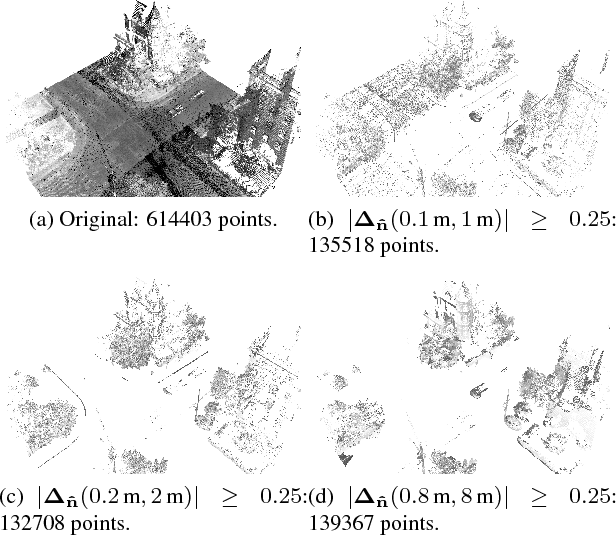
A novel multi-scale operator for unorganized 3D point clouds is introduced. The Difference of Normals (DoN) provides a computationally efficient, multi-scale approach to processing large unorganized 3D point clouds. The application of DoN in the multi-scale filtering of two different real-world outdoor urban LIDAR scene datasets is quantitatively and qualitatively demonstrated. In both datasets the DoN operator is shown to segment large 3D point clouds into scale-salient clusters, such as cars, people, and lamp posts towards applications in semi-automatic annotation, and as a pre-processing step in automatic object recognition. The application of the operator to segmentation is evaluated on a large public dataset of outdoor LIDAR scenes with ground truth annotations.