 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIncremental Control Synthesis in Probabilistic Environments with Temporal Logic Constraints
Paper and Code
Sep 05, 2012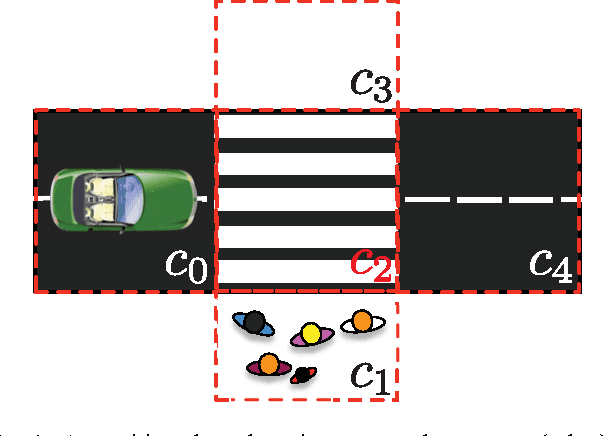
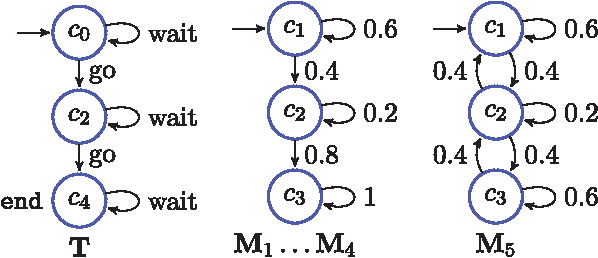
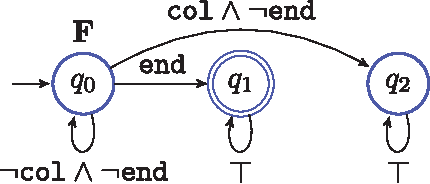
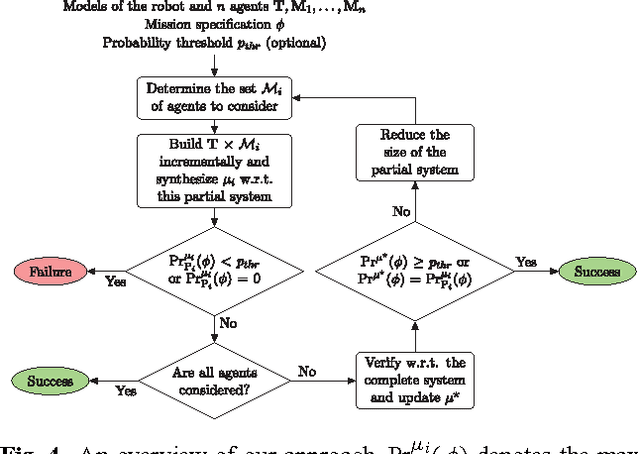
In this paper, we present a method for optimal control synthesis of a plant that interacts with a set of agents in a graph-like environment. The control specification is given as a temporal logic statement about some properties that hold at the vertices of the environment. The plant is assumed to be deterministic, while the agents are probabilistic Markov models. The goal is to control the plant such that the probability of satisfying a syntactically co-safe Linear Temporal Logic formula is maximized. We propose a computationally efficient incremental approach based on the fact that temporal logic verification is computationally cheaper than synthesis. We present a case-study where we compare our approach to the classical non-incremental approach in terms of computation time and memory usage.