 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFirst Clinical Experience in Urologic Surgery with a Novel Robotic Lightweight Laparoscope Holder
Paper and Code
Aug 31, 2012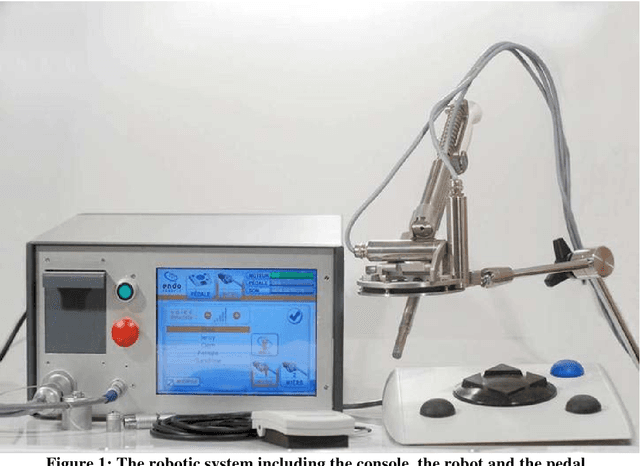
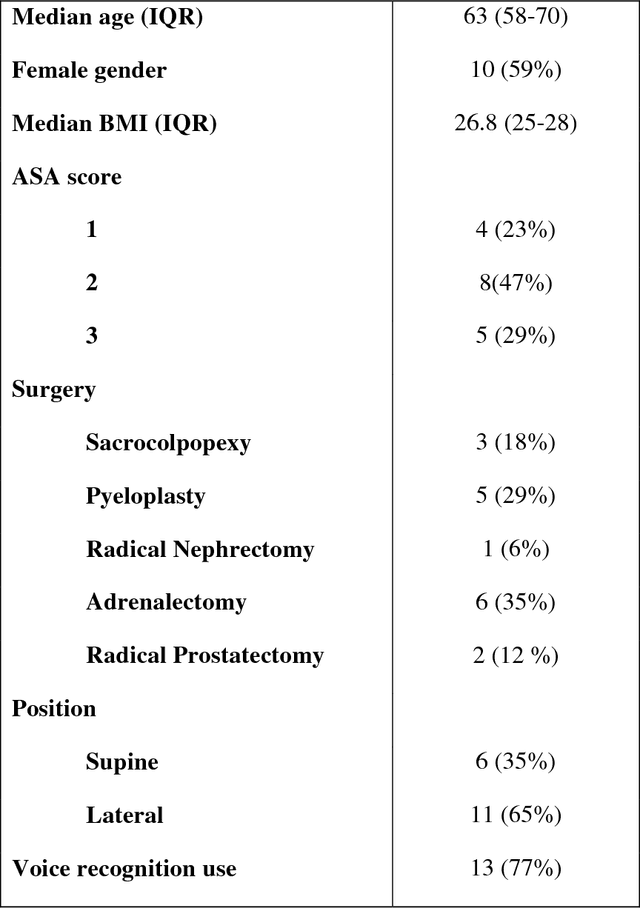

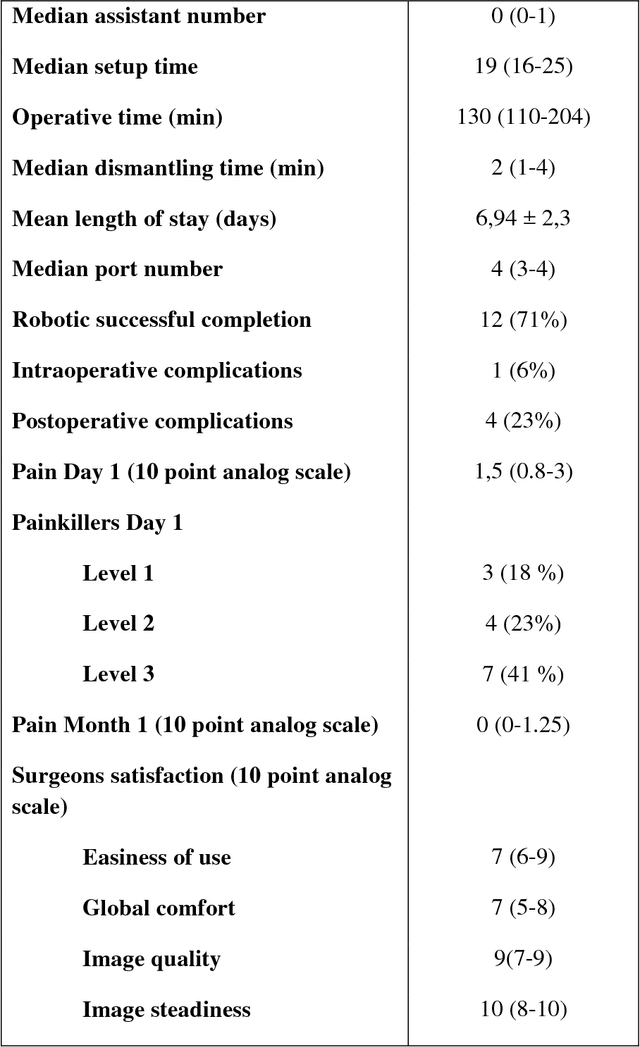
Purpose: To report the feasibility and the safety of a surgeon-controlled robotic endoscope holder in laparoscopic surgery. Materials and methods: From March 2010 to September 2010, 20 patients were enrolled prospectively to undergo a laparoscopic surgery using an innovative robotic endoscope holder. Two surgeons performed 6 adrenalectomies, 4 sacrocolpopexies, 5 pyeloplasties, 4 radical prostatectomies and 1 radical nephrectomy. Demographic data, overall set-up time, operative time, number of assistants needed were reviewed. Surgeon's satisfaction regarding the ergonomics was assessed using a ten point scale. Postoperative clinical outcomes were reviewed at day 1 and 1 month postoperatively. Results: The per-protocol analysis was performed on 17 patients for whom the robot was effectively used for surgery. Median age was 63 years, 10 patients were female (59%). Median BMI was 26.8. Surgical procedures were completed with the robot in 12 cases (71 %). Median number of surgical assistant was 0. Overall set-up time with the robot was 19 min, operative time was 130 min) during which the robot was used 71% of the time. Mean hospital stay was 6.94 days $\pm$ 2.3. Median score regarding the easiness of use was 7. Median pain level was 1.5/10 at day 1 and 0 at 1 month postoperatively. Open conversion was needed in 1 case (6 %) and 4 minor complications occurred in 2 patients (12%). Conclusion: This use of this novel robotic laparoscope holder is safe, feasible and it provides a good comfort to the surgeon.