 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Markov Information-Theoretic Path Planning for Robotic Environmental Sensing
Paper and Code
Jan 28, 2011
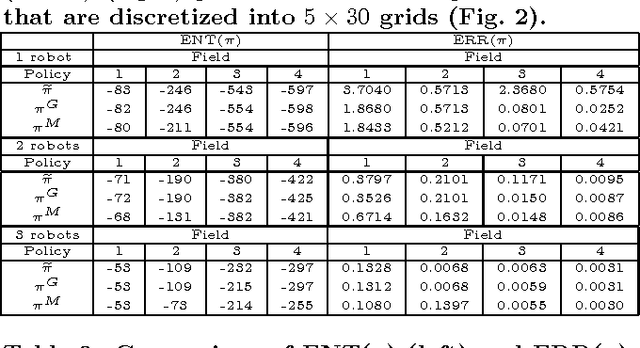


Recent research in multi-robot exploration and mapping has focused on sampling environmental fields, which are typically modeled using the Gaussian process (GP). Existing information-theoretic exploration strategies for learning GP-based environmental field maps adopt the non-Markovian problem structure and consequently scale poorly with the length of history of observations. Hence, it becomes computationally impractical to use these strategies for in situ, real-time active sampling. To ease this computational burden, this paper presents a Markov-based approach to efficient information-theoretic path planning for active sampling of GP-based fields. We analyze the time complexity of solving the Markov-based path planning problem, and demonstrate analytically that it scales better than that of deriving the non-Markovian strategies with increasing length of planning horizon. For a class of exploration tasks called the transect sampling task, we provide theoretical guarantees on the active sampling performance of our Markov-based policy, from which ideal environmental field conditions and sampling task settings can be established to limit its performance degradation due to violation of the Markov assumption. Empirical evaluation on real-world temperature and plankton density field data shows that our Markov-based policy can generally achieve active sampling performance comparable to that of the widely-used non-Markovian greedy policies under less favorable realistic field conditions and task settings while enjoying significant computational gain over them.