 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChannel State Information Analysis for Jamming Attack Detection in Static and Dynamic UAV Networks -- An Experimental Study
Apr 08, 2025



Networks built on the IEEE 802.11 standard have experienced rapid growth in the last decade. Their field of application is vast, including smart home applications, Internet of Things (IoT), and short-range high throughput static and dynamic inter-vehicular communication networks. Within such networks, Channel State Information (CSI) provides a detailed view of the state of the communication channel and represents the combined effects of multipath propagation, scattering, phase shift, fading, and power decay. In this work, we investigate the problem of jamming attack detection in static and dynamic vehicular networks. We utilize ESP32-S3 modules to set up a communication network between an Unmanned Aerial Vehicle (UAV) and a Ground Control Station (GCS), to experimentally test the combined effects of a constant jammer on recorded CSI parameters, and the feasibility of jamming detection through CSI analysis in static and dynamic communication scenarios.
Towards Secure and Reliable Heterogeneous Real-time Telemetry Communication in Autonomous UAV Swarms
Apr 11, 2024In the era of cutting-edge autonomous systems, Unmanned Aerial Vehicles (UAVs) are becoming an essential part of the solutions for numerous complex challenges. This paper evaluates UAV peer-to-peer telemetry communication, highlighting its security vulnerabilities and explores a transition to a het-erogeneous multi-hop mesh all-to-all communication architecture to increase inter-swarm connectivity and reliability. Additionally, we suggest a symmetric key agreement and data encryption mechanism implementation for inter - swarm communication, to ensure data integrity and confidentiality without compromising performance.
Distributed Artificial Intelligence as a Means to Achieve Self-X-Functions for Increasing Resilience: the First Steps
Apr 09, 2024

Using sensors as a means to achieve self-awareness and artificial intelligence for decision-making, may be a way to make complex systems self-adaptive, autonomous and resilient. Investigating the combination of distributed artificial intelligence methods and bio-inspired robotics can provide results that will be helpful for implementing autonomy of such robots and other complex systems. In this paper, we describe Distributed Artificial Intelligence application area, the most common examples of continuum robots and provide a description of our first steps towards implementing distributed control.
Resilient Movement Planning for Continuum Robots
Apr 09, 2024The paper presents an experimental study of resilient path planning for con-tinuum robots taking into account the multi-objective optimisation problem. To do this, we used two well-known algorithms, namely Genetic algorithm and A* algorithm, for path planning and the Analytical Hierarchy Process al-gorithm for paths evaluation. In our experiment Analytical Hierarchy Process algorithm considers four different criteria, i.e. distance, motors damage, me-chanical damage and accuracy each considered to contribute to the resilience of a continuum robot. The use of different criteria is necessary to increasing the time to maintenance operations of the robot. The experiment shows that on the one hand both algorithms can be used in combination with Analytical Hierarchy Process algorithm for multi criteria path-planning, while Genetic algorithm shows superior performance in the comparison of the two algo-rithms.
Intelligence and Motion Models of Continuum Robots: an Overview
Apr 09, 2024



Many technical solutions are bio-inspired. Octopus-inspired robotic arms belong to continuum robots which are used in minimally invasive surgery or for technical system restoration in areas difficult-toaccess. Continuum robot missions are bounded with their motions, whereby the motion of the robots is controlled by humans via wireless communication. In case of a lost connection, robot autonomy is required. Distributed control and distributed decision-making mechanisms based on artificial intelligence approaches can be a promising solution to achieve autonomy of technical systems and to increase their resilience. However these methods are not well investigated yet. Octopuses are the living example of natural distributed intelligence but their learning and decision-making mechanisms are also not fully investigated and understood yet. Our major interest is investigating mechanisms of Distributed Artificial Intelligence as a basis for improving resilience of complex systems. We decided to use a physical continuum robot prototype that is able to perform some basic movements for our research. The idea is to research how a technical system can be empowered to combine movements into sequences of motions by itself. For the experimental investigations a suitable physical prototype has to be selected, its motion control has to be implemented and automated. In this paper, we give an overview combining different fields of research, such as Distributed Artificial Intelligence and continuum robots based on 98 publications. We provide a detailed description of the basic motion control models of continuum robots based on the literature reviewed, discuss different aspects of autonomy and give an overview of physical prototypes of continuum robots.
Octopuses: biological facts and technical solutions
Jan 12, 2022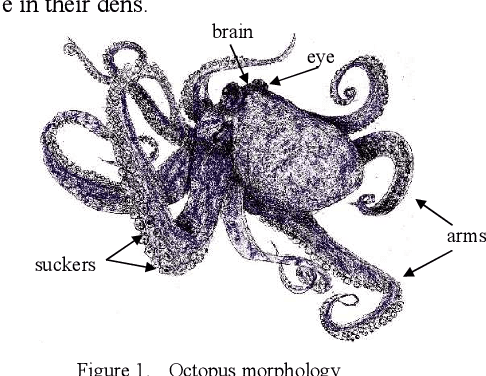
Octopus is an invertebrate belonging to the class of Cephalopoda. The body of an Octopus lacks any morphological joints and rigid parts. Their arms, skin and the complex nervous system are investigated by a several researchers all over the world. Octopuses are the object of inspiration for my scientists in different areas, including AI. Soft- and hardware are developed based on octopus features. Soft-robotics octopus-inspired arms are the most common type of developments. There are a lot of different variants of this solution, each of them is different from the other. In this paper, we describe the most remarkable octopus features, show solutions inspired by octopus and provide new ideas for further work and investigations in combination of AI and bioinspired soft-robotics areas.